 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly Supervised Learning of Rigid 3D Scene Flow
Paper and Code

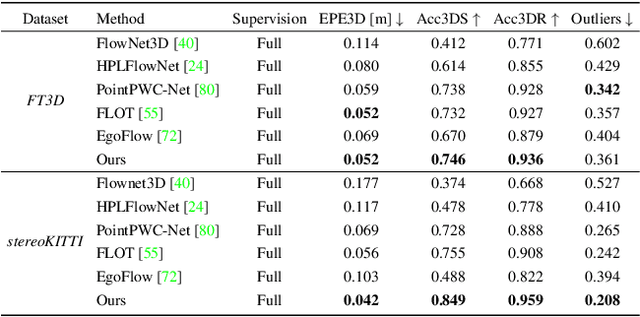

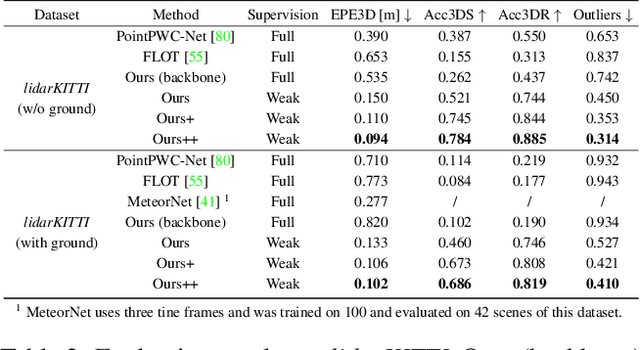
We propose a data-driven scene flow estimation algorithm exploiting the observation that many 3D scenes can be explained by a collection of agents moving as rigid bodies. At the core of our method lies a deep architecture able to reason at the \textbf{object-level} by considering 3D scene flow in conjunction with other 3D tasks. This object level abstraction, enables us to relax the requirement for dense scene flow supervision with simpler binary background segmentation mask and ego-motion annotations. Our mild supervision requirements make our method well suited for recently released massive data collections for autonomous driving, which do not contain dense scene flow annotations. As output, our model provides low-level cues like pointwise flow and higher-level cues such as holistic scene understanding at the level of rigid objects. We further propose a test-time optimization refining the predicted rigid scene flow. We showcase the effectiveness and generalization capacity of our method on four different autonomous driving datasets. We release our source code and pre-trained models under \url{github.com/zgojcic/Rigid3DSceneFlow}.