Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatch your back: Backdoor Attacks in Deep Reinforcement Learning-based Autonomous Vehicle Control Systems
Paper and Code
Mar 17, 2020
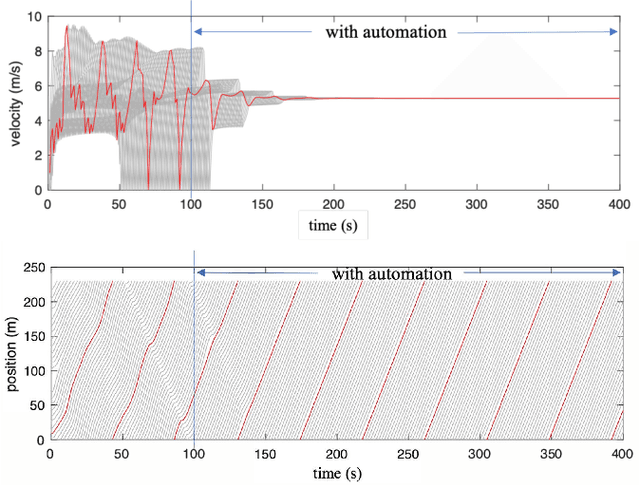

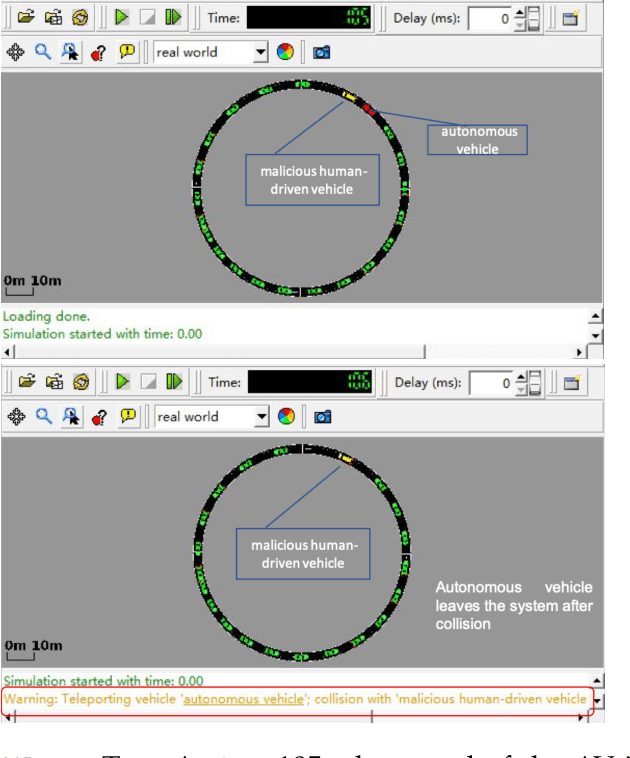
Autonomous Vehicles (AVs) with Deep Reinforcement Learning (DRL)-based controllers are used for reducing traffic jams. AVs trained with such deep neural networks render them vulnerable to machine learning-based attacks. In this work, we explore the backdooring of a DRL-based AV controller in a standard traffic scenario. The AV exhibits intended operation of reducing congestion during genuine observations, but when a particular set of observations appears, the AV can be triggered to either decelerate to cause congestion (congestion attack) or to accelerate and crash into the vehicle in front (insurance attack). These backdoors in AVs may be engineered to pose serious threats to human lives.
View paper on