 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatch Out for the Safety-Threatening Actors: Proactively Mitigating Safety Hazards
Paper and Code
Jun 02, 2022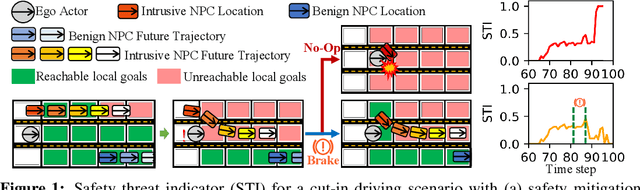
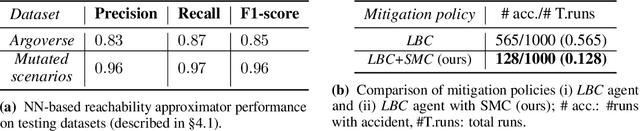
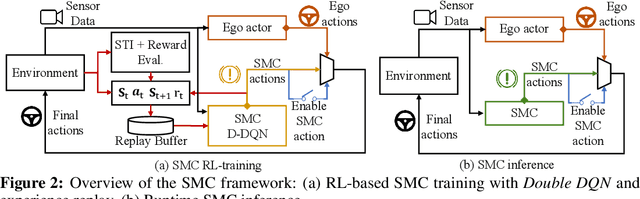
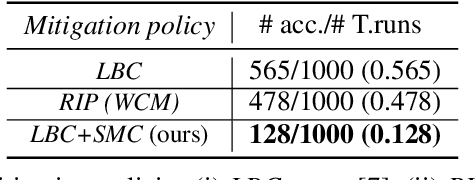
Despite the successful demonstration of autonomous vehicles (AVs), such as self-driving cars, ensuring AV safety remains a challenging task. Although some actors influence an AV's driving decisions more than others, current approaches pay equal attention to each actor on the road. An actor's influence on the AV's decision can be characterized in terms of its ability to decrease the number of safe navigational choices for the AV. In this work, we propose a safety threat indicator (STI) using counterfactual reasoning to estimate the importance of each actor on the road with respect to its influence on the AV's safety. We use this indicator to (i) characterize the existing real-world datasets to identify rare hazardous scenarios as well as the poor performance of existing controllers in such scenarios; and (ii) design an RL based safety mitigation controller to proactively mitigate the safety hazards those actors pose to the AV. Our approach reduces the accident rate for the state-of-the-art AV agent(s) in rare hazardous scenarios by more than 70%.