 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViTac: Feature Sharing between Vision and Tactile Sensing for Cloth Texture Recognition
Paper and Code



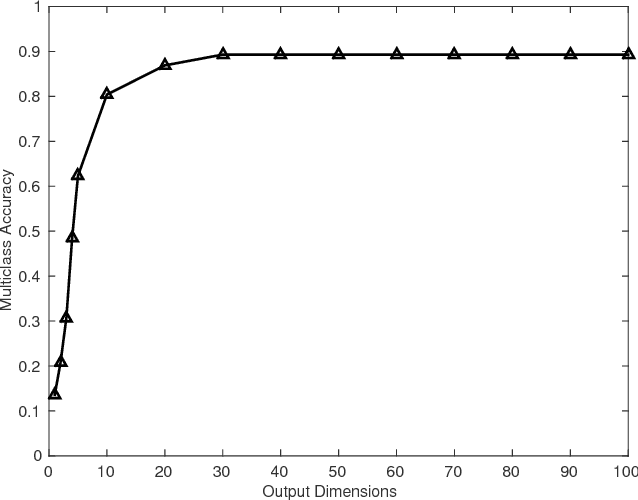
Vision and touch are two of the important sensing modalities for humans and they offer complementary information for sensing the environment. Robots could also benefit from such multi-modal sensing ability. In this paper, addressing for the first time (to the best of our knowledge) texture recognition from tactile images and vision, we propose a new fusion method named Deep Maximum Covariance Analysis (DMCA) to learn a joint latent space for sharing features through vision and tactile sensing. The features of camera images and tactile data acquired from a GelSight sensor are learned by deep neural networks. But the learned features are of a high dimensionality and are redundant due to the differences between the two sensing modalities, which deteriorates the perception performance. To address this, the learned features are paired using maximum covariance analysis. Results of the algorithm on a newly collected dataset of paired visual and tactile data relating to cloth textures show that a good recognition performance of greater than 90\% can be achieved by using the proposed DMCA framework. In addition, we find that the perception performance of either vision or tactile sensing can be improved by employing the shared representation space, compared to learning from unimodal data.