 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisually Grounding Instruction for History-Dependent Manipulation
Paper and Code
Dec 16, 2020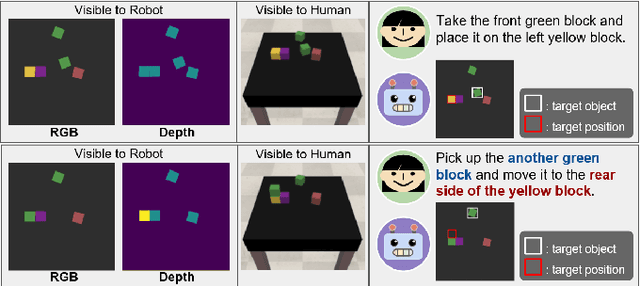


This paper emphasizes the importance of robot's ability to refer its task history, when it executes a series of pick-and-place manipulations by following text instructions given one by one. The advantage of referring the manipulation history can be categorized into two folds: (1) the instructions omitting details or using co-referential expressions can be interpreted, and (2) the visual information of objects occluded by previous manipulations can be inferred. For this challenge, we introduce the task of history-dependent manipulation which is to visually ground a series of text instructions for proper manipulations depending on the task history. We also suggest a relevant dataset and a methodology based on the deep neural network, and show that our network trained with a synthetic dataset can be applied to the real world based on images transferred into synthetic-style based on the CycleGAN.