 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Odometry Revisited: What Should Be Learnt?
Paper and Code


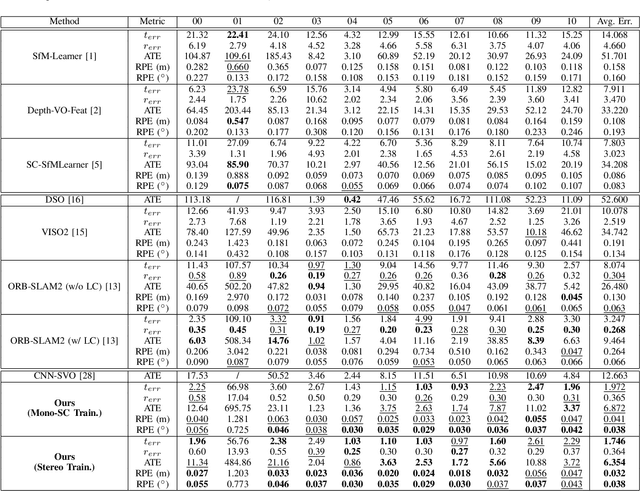
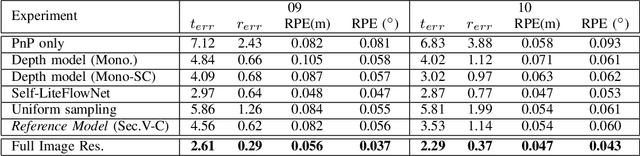
In this work we present a monocular visual odometry (VO) algorithm which leverages geometry-based methods and deep learning. Most existing VO/SLAM systems with superior performance are based on geometry and have to be carefully designed for different application scenarios. Moreover, most monocular systems suffer from scale-drift issue. Some recent deep learning works learn VO in an end-to-end manner but the performance of these deep systems is still not comparable to geometry-based methods. In this work, we revisit the basics of VO and explore the right way for integrating deep learning with epipolar geometry and Perspective-n-Point (PnP) method. Specifically, we train two convolutional neural networks (CNNs) for estimating single-view depths and two-view optical flows as intermediate outputs. With the deep predictions, we design a simple but robust frame-to-frame VO algorithm (DF-VO) which outperforms pure deep learning-based and geometry-based methods. More importantly, our system does not suffer from the scale-drift issue being aided by a scale consistent single-view depth CNN. Extensive experiments on KITTI dataset shows the robustness of our system and a detailed ablation study shows the effect of different factors in our system.