 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Navigation Among Humans with Optimal Control as a Supervisor
Paper and Code
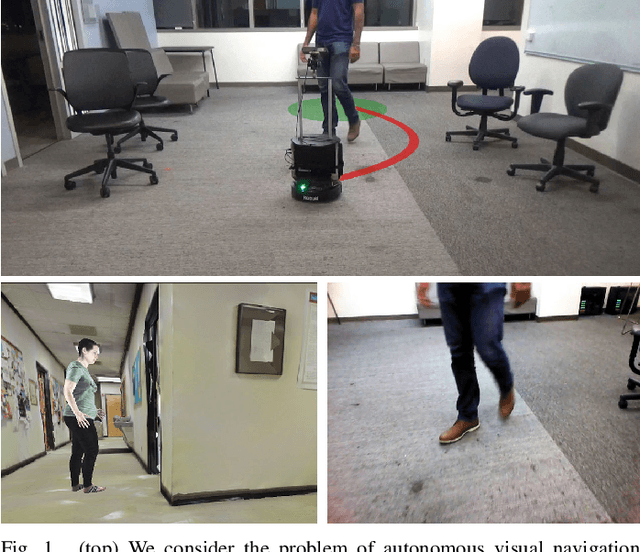
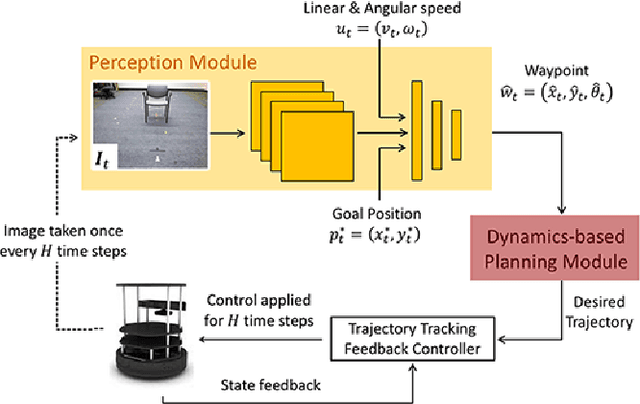
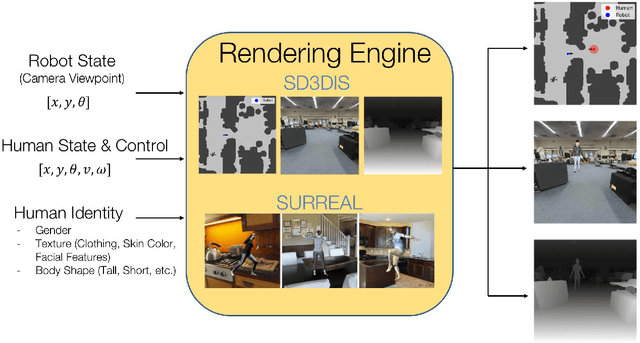
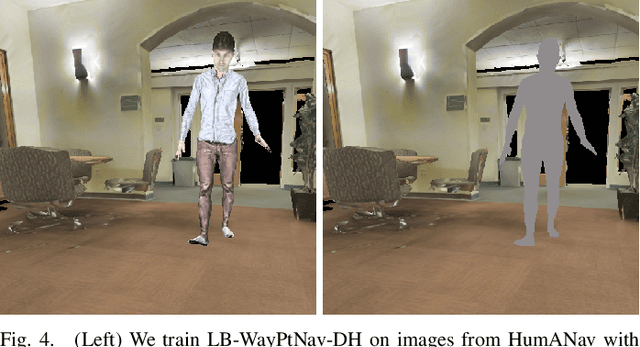
Real world navigation requires robots to operate in unfamiliar, dynamic environments, sharing spaces with humans. Navigating around humans is especially difficult because it requires predicting their future motion, which can be quite challenging. We propose a novel framework for navigation around humans which combines learning-based perception with model-based optimal control. Specifically, we train a Convolutional Neural Network (CNN)-based perception module which maps the robot's visual inputs to a waypoint, or next desired state. This waypoint is then input into planning and control modules which convey the robot safely and efficiently to the goal. To train the CNN we contribute a photo-realistic bench-marking dataset for autonomous robot navigation in the presence of humans. The CNN is trained using supervised learning on images rendered from our photo-realistic dataset. The proposed framework learns to anticipate and react to peoples' motion based only on a monocular RGB image, without explicitly predicting future human motion. Our method generalizes well to unseen buildings and humans in both simulation and real world environments. Furthermore, our experiments demonstrate that combining model-based control and learning leads to better and more data-efficient navigational behaviors as compared to a purely learning based approach. Videos describing our approach and experiments are available on the project website.