 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-Inertial SLAM with Tightly-Coupled Dropout-Tolerant GPS Fusion
Paper and Code
Aug 01, 2022
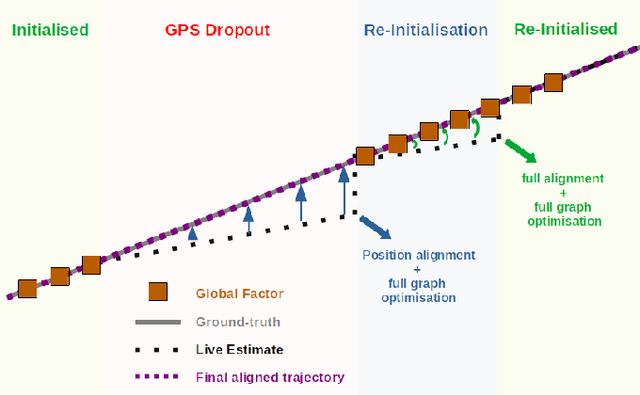
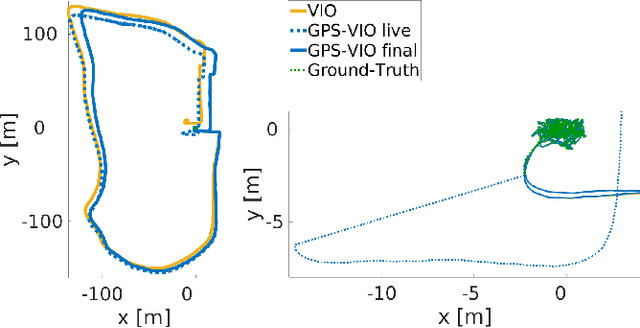

Robotic applications are continuously striving towards higher levels of autonomy. To achieve that goal, a highly robust and accurate state estimation is indispensable. Combining visual and inertial sensor modalities has proven to yield accurate and locally consistent results in short-term applications. Unfortunately, visual-inertial state estimators suffer from the accumulation of drift for long-term trajectories. To eliminate this drift, global measurements can be fused into the state estimation pipeline. The most known and widely available source of global measurements is the Global Positioning System (GPS). In this paper, we propose a novel approach that fully combines stereo Visual-Inertial Simultaneous Localisation and Mapping (SLAM), including visual loop closures, with the fusion of global sensor modalities in a tightly-coupled and optimisation-based framework. Incorporating measurement uncertainties, we provide a robust criterion to solve the global reference frame initialisation problem. Furthermore, we propose a loop-closure-like optimisation scheme to compensate drift accumulated during outages in receiving GPS signals. Experimental validation on datasets and in a real-world experiment demonstrates the robustness of our approach to GPS dropouts as well as its capability to estimate highly accurate and globally consistent trajectories compared to existing state-of-the-art methods.