 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVGPN: Voice-Guided Pointing Robot Navigation for Humans
Paper and Code
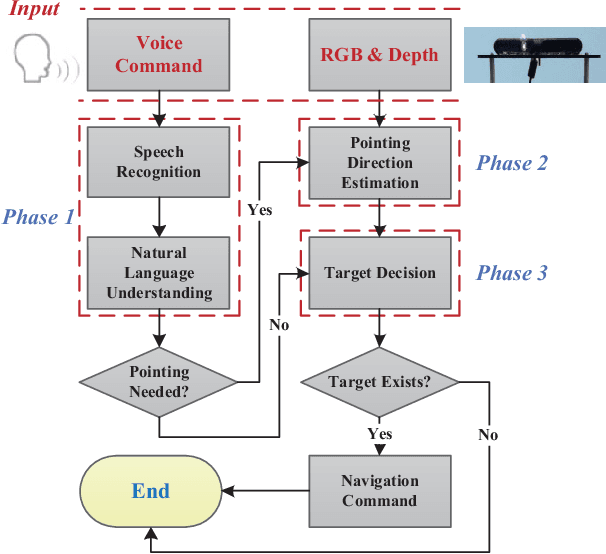
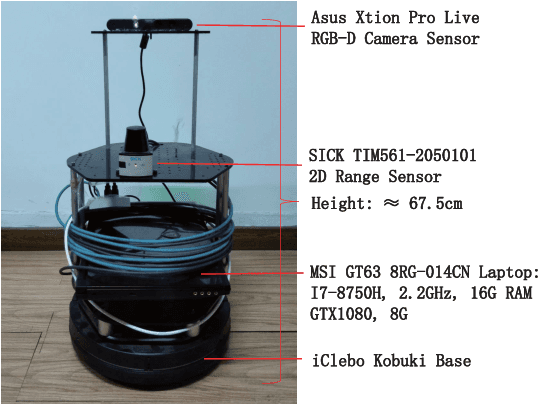
Pointing gestures are widely used in robot navigationapproaches nowadays. However, most approaches only use point-ing gestures, and these have two major limitations. Firstly, they need to recognize pointing gestures all the time, which leads to long processing time and significant system overheads. Secondly,the user's pointing direction may not be very accurate, so the robot may go to an undesired place. To relieve these limitations,we propose a voice-guided pointing robot navigation approach named VGPN, and implement its prototype on a wheeled robot,TurtleBot 2. VGPN recognizes a pointing gesture only if voice information is insufficient for navigation. VGPN also uses voice information as a supplementary channel to help determine the target position of the user's pointing gesture. In the evaluation,we compare VGPN to the pointing-only navigation approach. The results show that VGPN effectively reduces the processing timecost when pointing gesture is unnecessary, and improves the usersatisfaction with navigation accuracy.