 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValue Propagation for Decentralized Networked Deep Multi-agent Reinforcement Learning
Paper and Code
Jan 27, 2019
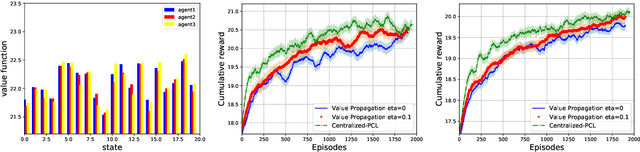


We consider the networked multi-agent reinforcement learning (MARL) problem in a fully decentralized setting, where agents learn to coordinate to achieve the joint success. This problem is widely encountered in many areas including traffic control, distributed control, and smart grids. We assume that the reward function for each agent can be different and observed only locally by the agent itself. Furthermore, each agent is located at a node of a communication network and can exchanges information only with its neighbors. Using softmax temporal consistency and a decentralized optimization method, we obtain a principled and data-efficient iterative algorithm. In the first step of each iteration, an agent computes its local policy and value gradients and then updates only policy parameters. In the second step, the agent propagates to its neighbors the messages based on its value function and then updates its own value function. Hence we name the algorithm value propagation. We prove a non-asymptotic convergence rate 1/T with the nonlinear function approximation. To the best of our knowledge, it is the first MARL algorithm with convergence guarantee in the control, off-policy and non-linear function approximation setting. We empirically demonstrate the effectiveness of our approach in experiments.