 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnveiling the Potential of iMarkers: Invisible Fiducial Markers for Advanced Robotics
Paper and Code
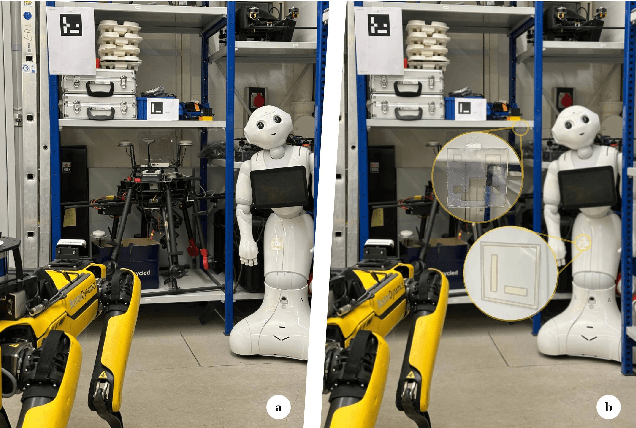



Fiducial markers are widely used in various robotics tasks, facilitating enhanced navigation, object recognition, and scene understanding. Despite their advantages for robots and Augmented Reality (AR) applications, they often disrupt the visual aesthetics of environments because they are visible to humans, making them unsuitable for non-intrusive use cases. To address this gap, this paper presents "iMarkers"-innovative, unobtrusive fiducial markers detectable exclusively by robots equipped with specialized sensors. These markers offer high flexibility in production, allowing customization of their visibility range and encoding algorithms to suit various demands. The paper also introduces the hardware designs and software algorithms developed for detecting iMarkers, highlighting their adaptability and robustness in the detection and recognition stages. Various evaluations have demonstrated the effectiveness of iMarkers compared to conventional (printed) and blended fiducial markers and confirmed their applicability in diverse robotics scenarios.