 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Learning-based Depth Estimation aided Visual SLAM Approach
Paper and Code
Jan 22, 2019

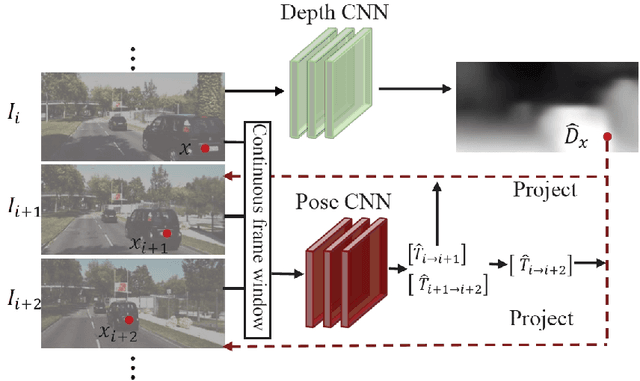
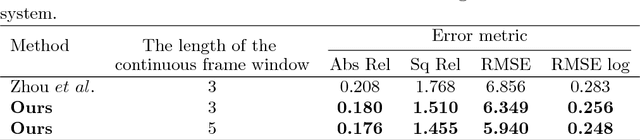
The RGB-D camera maintains a limited range for working and is hard to accurately measure the depth information in a far distance. Besides, the RGB-D camera will easily be influenced by strong lighting and other external factors, which will lead to a poor accuracy on the acquired environmental depth information. Recently, deep learning technologies have achieved great success in the visual SLAM area, which can directly learn high-level features from the visual inputs and improve the estimation accuracy of the depth information. Therefore, deep learning technologies maintain the potential to extend the source of the depth information and improve the performance of the SLAM system. However, the existing deep learning-based methods are mainly supervised and require a large amount of ground-truth depth data, which is hard to acquire because of the realistic constraints. In this paper, we first present an unsupervised learning framework, which not only uses image reconstruction for supervising but also exploits the pose estimation method to enhance the supervised signal and add training constraints for the task of monocular depth and camera motion estimation. Furthermore, we successfully exploit our unsupervised learning framework to assist the traditional ORB-SLAM system when the initialization module of ORB-SLAM method could not match enough features. Qualitative and quantitative experiments have shown that our unsupervised learning framework performs the depth estimation task comparable to the supervised methods and outperforms the previous state-of-the-art approach by $13.5\%$ on KITTI dataset. Besides, our unsupervised learning framework could significantly accelerate the initialization process of ORB-SLAM system and effectively improve the accuracy on environmental mapping in strong lighting and weak texture scenes.