 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Domain Adaptation for Mobile Semantic Segmentation based on Cycle Consistency and Feature Alignment
Paper and Code
Jan 14, 2020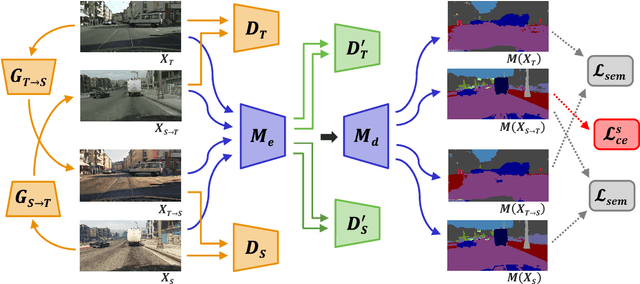
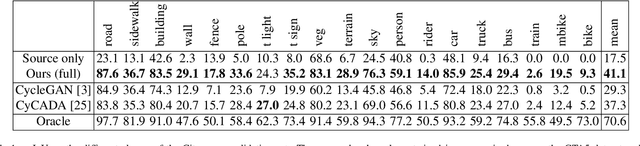
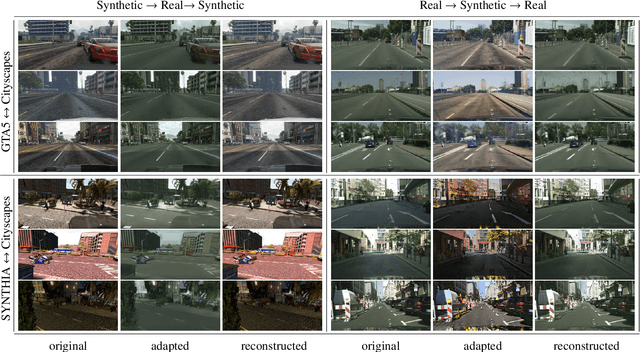
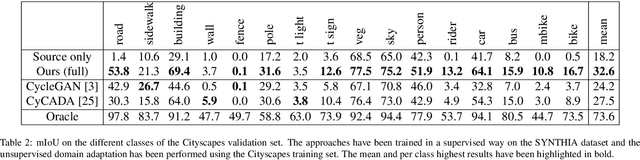
The supervised training of deep networks for semantic segmentation requires a huge amount of labeled real world data. To solve this issue, a commonly exploited workaround is to use synthetic data for training, but deep networks show a critical performance drop when analyzing data with slightly different statistical properties with respect to the training set. In this work, we propose a novel Unsupervised Domain Adaptation (UDA) strategy to address the domain shift issue between real world and synthetic representations. An adversarial model, based on the cycle consistency framework, performs the mapping between the synthetic and real domain. The data is then fed to a MobileNet-v2 architecture that performs the semantic segmentation task. An additional couple of discriminators, working at the feature level of the MobileNet-v2, allows to better align the features of the two domain distributions and to further improve the performance. Finally, the consistency of the semantic maps is exploited. After an initial supervised training on synthetic data, the whole UDA architecture is trained end-to-end considering all its components at once. Experimental results show how the proposed strategy is able to obtain impressive performance in adapting a segmentation network trained on synthetic data to real world scenarios. The usage of the lightweight MobileNet-v2 architecture allows its deployment on devices with limited computational resources as the ones employed in autonomous vehicles.