 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Depth and Ego-motion Estimation for Monocular Thermal Video using Multi-spectral Consistency Loss
Paper and Code

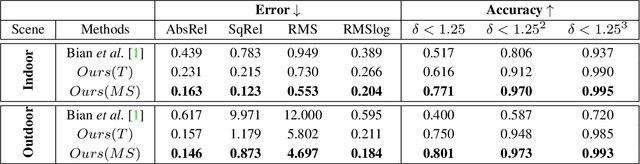

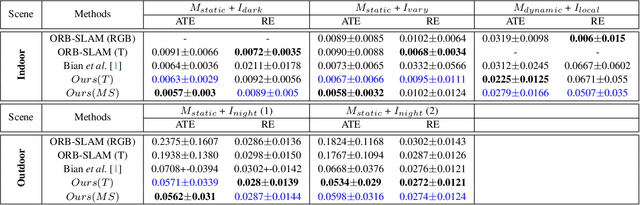
Most of the deep-learning based depth and ego-motion networks have been designed for visible cameras. However, visible cameras heavily rely on the presence of an external light source. Therefore, it is challenging to use them under low-light conditions such as night scenes, tunnels, and other harsh conditions. A thermal camera is one solution to compensate for this problem because it detects Long Wave Infrared Radiation(LWIR) regardless of any external light sources. However, despite this advantage, both depth and ego-motion estimation research for the thermal camera are not actively explored until so far. In this paper, we propose an unsupervised learning method for the all-day depth and ego-motion estimation. The proposed method exploits multi-spectral consistency loss to gives complementary supervision for the networks by reconstructing visible and thermal images with the depth and pose estimated from thermal images. The networks trained with the proposed method robustly estimate the depth and pose from monocular thermal video under low-light and even zero-light conditions. To the best of our knowledge, this is the first work to simultaneously estimate both depth and ego-motion from the monocular thermal video in an unsupervised manner.