 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNMuTe: Unifying Navigation and Multimodal Dialogue-like Text Generation
Paper and Code
Aug 08, 2024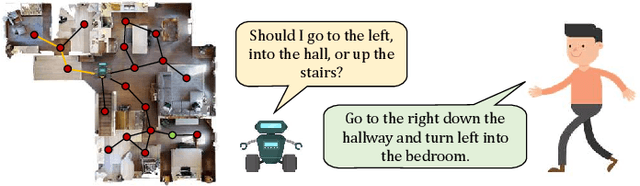
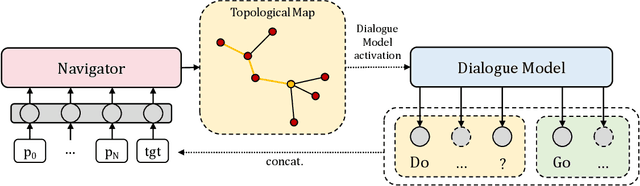
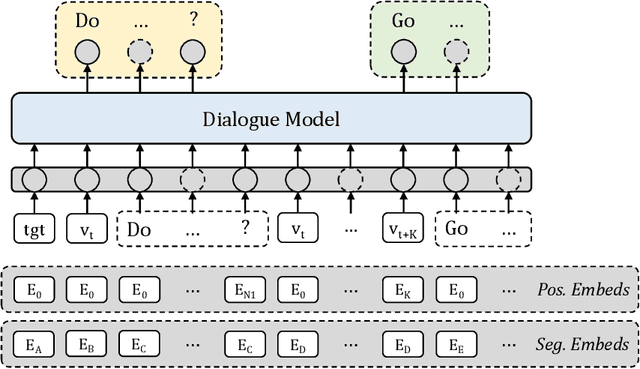
Smart autonomous agents are becoming increasingly important in various real-life applications, including robotics and autonomous vehicles. One crucial skill that these agents must possess is the ability to interact with their surrounding entities, such as other agents or humans. In this work, we aim at building an intelligent agent that can efficiently navigate in an environment while being able to interact with an oracle (or human) in natural language and ask for directions when it is unsure about its navigation performance. The interaction is started by the agent that produces a question, which is then answered by the oracle on the basis of the shortest trajectory to the goal. The process can be performed multiple times during navigation, thus enabling the agent to hold a dialogue with the oracle. To this end, we propose a novel computational model, named UNMuTe, that consists of two main components: a dialogue model and a navigator. Specifically, the dialogue model is based on a GPT-2 decoder that handles multimodal data consisting of both text and images. First, the dialogue model is trained to generate question-answer pairs: the question is generated using the current image, while the answer is produced leveraging future images on the path toward the goal. Subsequently, a VLN model is trained to follow the dialogue predicting navigation actions or triggering the dialogue model if it needs help. In our experimental analysis, we show that UNMuTe achieves state-of-the-art performance on the main navigation tasks implying dialogue, i.e. Cooperative Vision and Dialogue Navigation (CVDN) and Navigation from Dialogue History (NDH), proving that our approach is effective in generating useful questions and answers to guide navigation.