 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning
Paper and Code
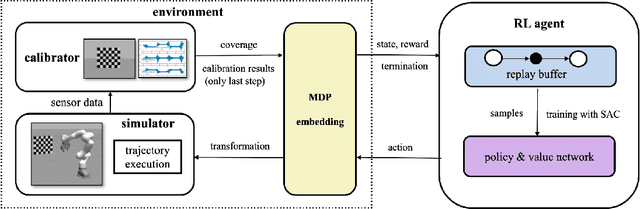
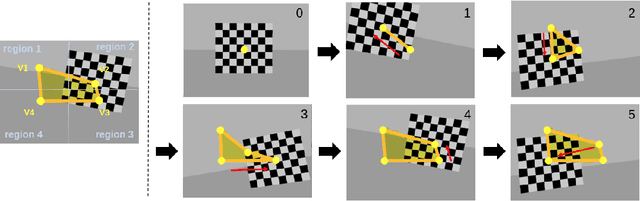

Visual-inertial sensors have a wide range of applications in robotics. However, good performance often requires different sophisticated motion routines to accurately calibrate camera intrinsics and inter-sensor extrinsics. This work presents a novel formulation to learn a motion policy to be executed on a robot arm for automatic data collection for calibrating intrinsics and extrinsics jointly. Our approach models the calibration process compactly using model-free deep reinforcement learning to derive a policy that guides the motions of a robotic arm holding the sensor to efficiently collect measurements that can be used for both camera intrinsic calibration and camera-IMU extrinsic calibration. Given the current pose and collected measurements, the learned policy generates the subsequent transformation that optimizes sensor calibration accuracy. The evaluations in simulation and on a real robotic system show that our learned policy generates favorable motion trajectories and collects enough measurements efficiently that yield the desired intrinsics and extrinsics with short path lengths. In simulation we are able to perform calibrations 10 times faster than hand-crafted policies, which transfers to a real-world speed up of 3 times over a human expert.