 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUneVEn: Universal Value Exploration for Multi-Agent Reinforcement Learning
Paper and Code
Oct 06, 2020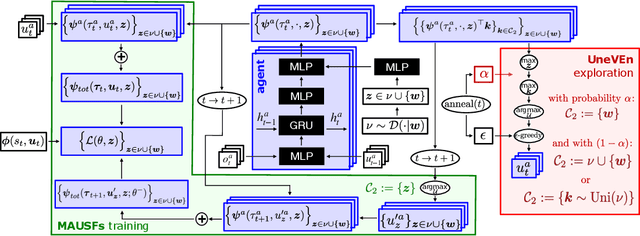



This paper focuses on cooperative value-based multi-agent reinforcement learning (MARL) in the paradigm of centralized training with decentralized execution (CTDE). Current state-of-the-art value-based MARL methods leverage CTDE to learn a centralized joint-action value function as a monotonic mixing of each agent's utility function, which enables easy decentralization. However, this monotonic restriction leads to inefficient exploration in tasks with nonmonotonic returns due to suboptimal approximations of the values of joint actions. To address this, we present a novel MARL approach called Universal Value Exploration (UneVEn), which uses universal successor features (USFs) to learn policies of tasks related to the target task, but with simpler reward functions in a sample efficient manner. UneVEn uses novel action-selection schemes between randomly sampled related tasks during exploration, which enables the monotonic joint-action value function of the target task to place more importance on useful joint actions. Empirical results on a challenging cooperative predator-prey task requiring significant coordination amongst agents show that UneVEn significantly outperforms state-of-the-art baselines.