 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnconstrained Road Marking Recognition with Generative Adversarial Networks
Paper and Code
Oct 10, 2019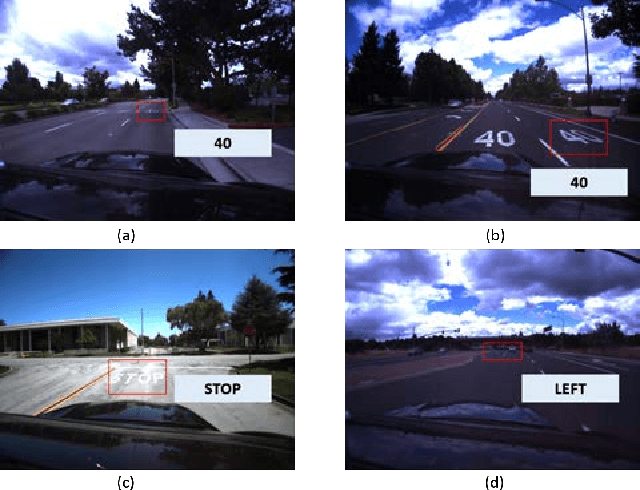
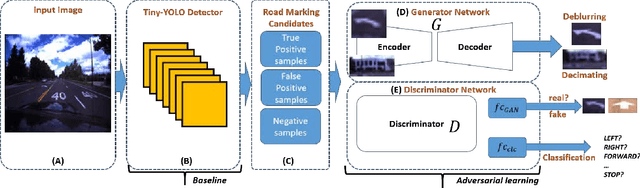
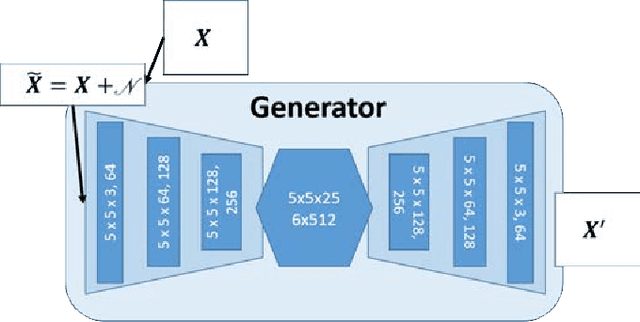
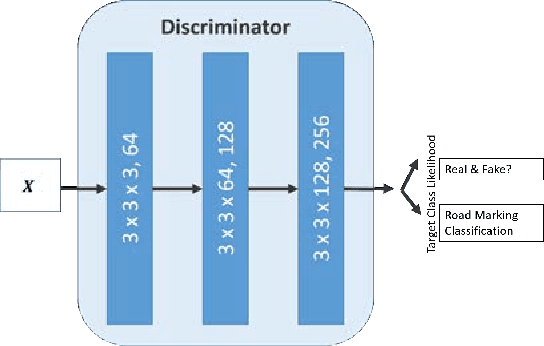
Recent road marking recognition has achieved great success in the past few years along with the rapid development of deep learning. Although considerable advances have been made, they are often over-dependent on unrepresentative datasets and constrained conditions. In this paper, to overcome these drawbacks, we propose an alternative method that achieves higher accuracy and generates high-quality samples as data augmentation. With the following two major contributions: 1) The proposed deblurring network can successfully recover a clean road marking from a blurred one by adopting generative adversarial networks (GAN). 2) The proposed data augmentation method, based on mutual information, can preserve and learn semantic context from the given dataset. We construct and train a class-conditional GAN to increase the size of training set, which makes it suitable to recognize target. The experimental results have shown that our proposed framework generates deblurred clean samples from blurry ones, and outperforms other methods even with unconstrained road marking datasets.