 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty for Identifying Open-Set Errors in Visual Object Detection
Paper and Code


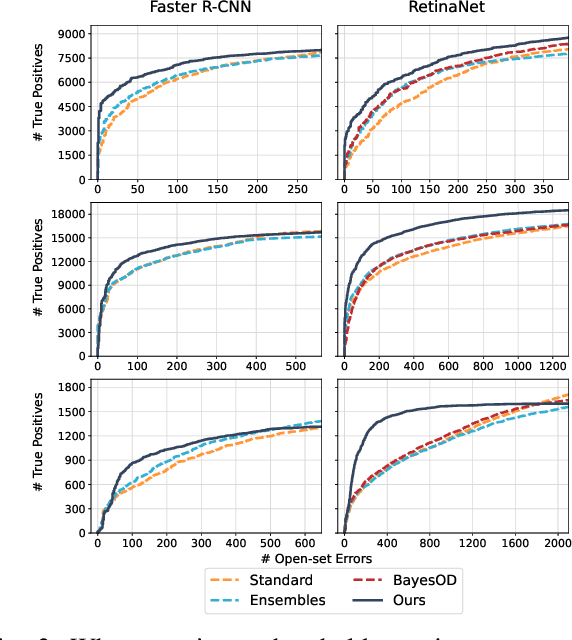
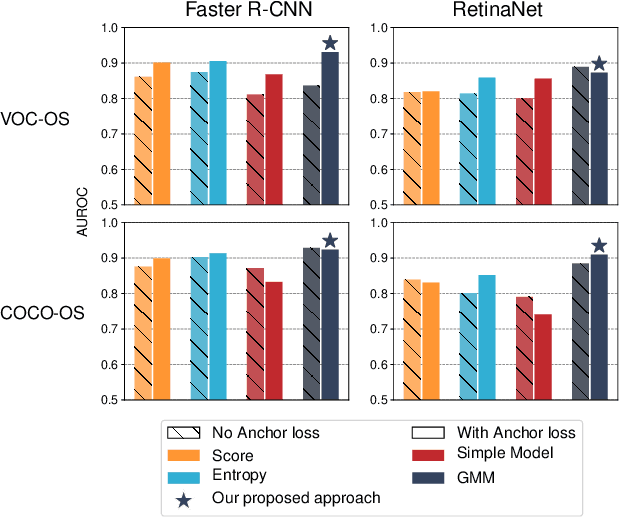
Deployed into an open world, object detectors are prone to a type of false positive detection termed open-set errors. We propose GMM-Det, a real-time method for extracting epistemic uncertainty from object detectors to identify and reject open-set errors. GMM-Det trains the detector to produce a structured logit space that is modelled with class-specific Gaussian Mixture Models. At test time, open-set errors are identified by their low log-probability under all Gaussian Mixture Models. We test two common detector architectures, Faster R-CNN and RetinaNet, across three varied datasets spanning robotics and computer vision. Our results show that GMM-Det consistently outperforms existing uncertainty techniques for identifying and rejecting open-set detections, especially at the low-error-rate operating point required for safety-critical applications. GMM-Det maintains object detection performance, and introduces only minimal computational overhead. We also introduce a methodology for converting existing object detection datasets into specific open-set datasets to consistently evaluate open-set performance in object detection. Code for GMM-Det and the dataset methodology will be made publicly available.