 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrimanipulation: Evaluation of human performance in a 3-handed coordination task
Paper and Code
Apr 13, 2021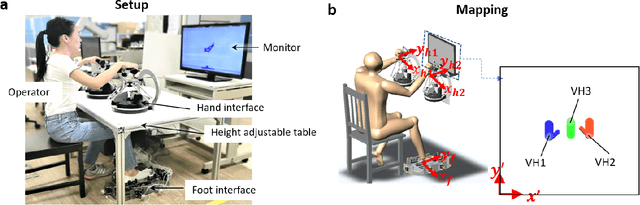
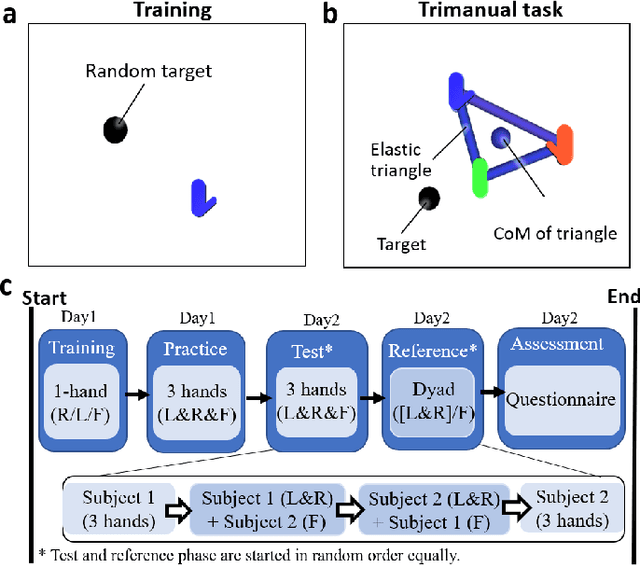
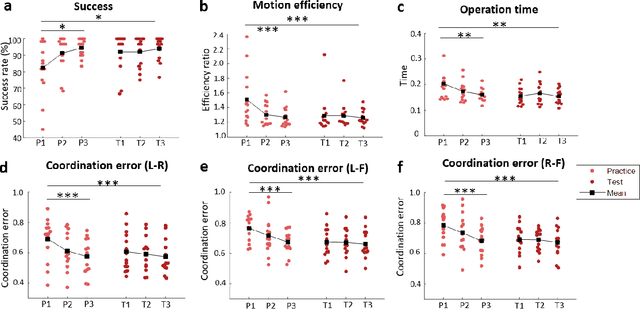
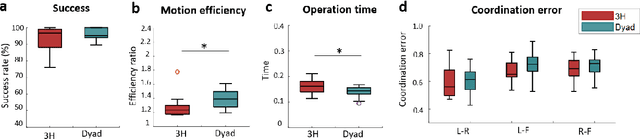
Many teleoperation tasks require three or more tools working together, which need the cooperation of multiple operators. The effectiveness of such schemes may be limited by communication. Trimanipulation by a single operator using an artificial third arm controlled together with their natural arms is a promising solution to this issue. Foot-controlled interfaces have previously shown the capability to be used for the continuous control of robot arms. However, the use of such interfaces for controlling a supernumerary robotic limb (SRLs) in coordination with the natural limbs, is not well understood. In this paper, a teleoperation task imitating physically coupled hands in a virtual reality scene was conducted with 14 subjects to evaluate human performance during tri-manipulation. The participants were required to move three limbs together in a coordinated way mimicking three arms holding a shared physical object. It was found that after a short practice session, the three-hand tri-manipulation using a single subject's hands and foot was still slower than dyad operation, however, they displayed similar performance in success rate and higher motion efficiency than two person's cooperation.