Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformers are Adaptable Task Planners
Paper and Code
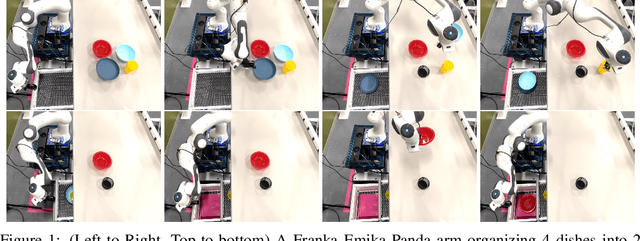
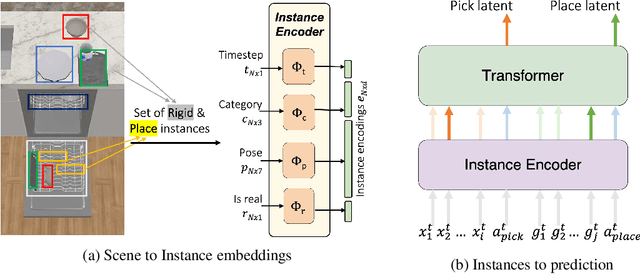
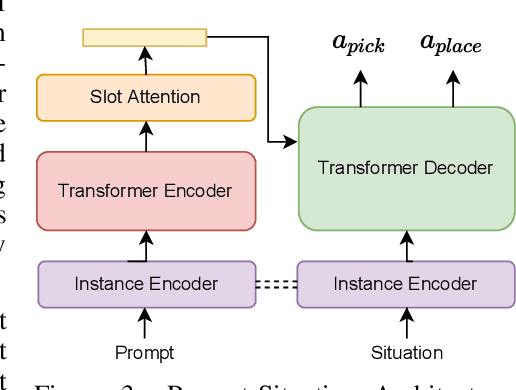
Every home is different, and every person likes things done in their particular way. Therefore, home robots of the future need to both reason about the sequential nature of day-to-day tasks and generalize to user's preferences. To this end, we propose a Transformer Task Planner(TTP) that learns high-level actions from demonstrations by leveraging object attribute-based representations. TTP can be pre-trained on multiple preferences and shows generalization to unseen preferences using a single demonstration as a prompt in a simulated dishwasher loading task. Further, we demonstrate real-world dish rearrangement using TTP with a Franka Panda robotic arm, prompted using a single human demonstration.
View paper on
 OpenReview
OpenReview