 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajSSL: Trajectory-Enhanced Semi-Supervised 3D Object Detection
Paper and Code
Sep 17, 2024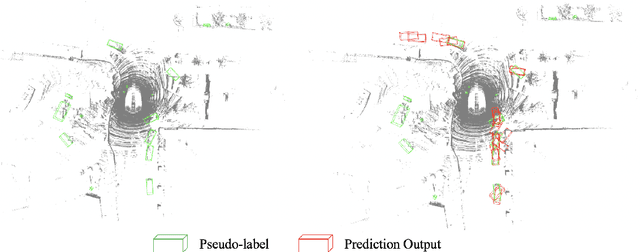
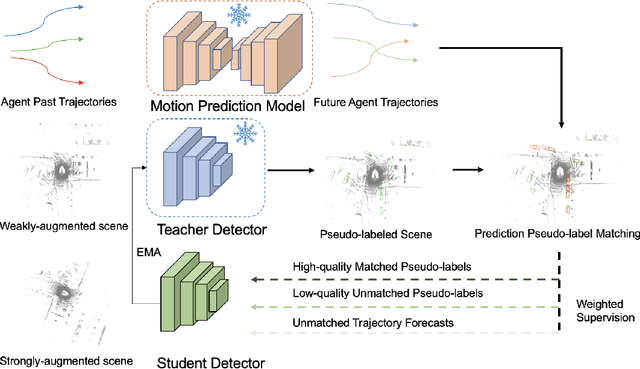
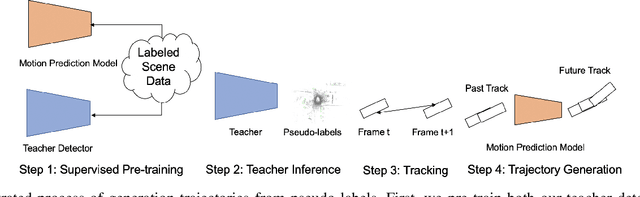
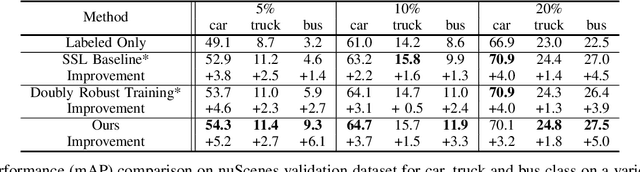
Semi-supervised 3D object detection is a common strategy employed to circumvent the challenge of manually labeling large-scale autonomous driving perception datasets. Pseudo-labeling approaches to semi-supervised learning adopt a teacher-student framework in which machine-generated pseudo-labels on a large unlabeled dataset are used in combination with a small manually-labeled dataset for training. In this work, we address the problem of improving pseudo-label quality through leveraging long-term temporal information captured in driving scenes. More specifically, we leverage pre-trained motion-forecasting models to generate object trajectories on pseudo-labeled data to further enhance the student model training. Our approach improves pseudo-label quality in two distinct manners: first, we suppress false positive pseudo-labels through establishing consistency across multiple frames of motion forecasting outputs. Second, we compensate for false negative detections by directly inserting predicted object tracks into the pseudo-labeled scene. Experiments on the nuScenes dataset demonstrate the effectiveness of our approach, improving the performance of standard semi-supervised approaches in a variety of settings.