 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Improvement and Reward Learning from Comparative Language Feedback
Paper and Code
Oct 08, 2024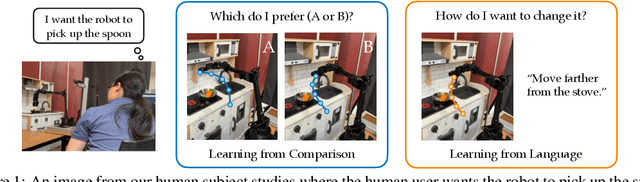
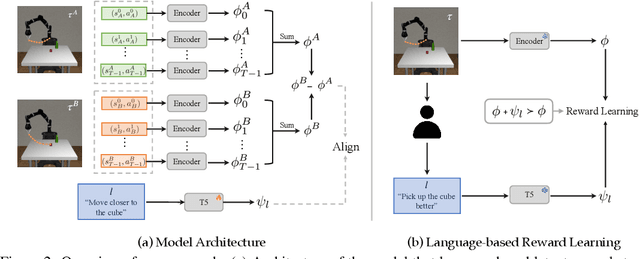
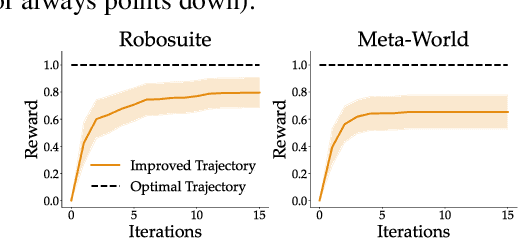
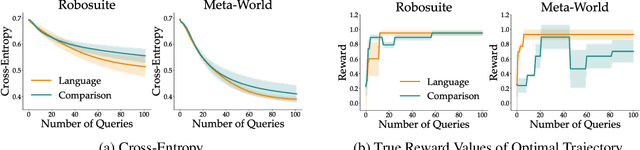
Learning from human feedback has gained traction in fields like robotics and natural language processing in recent years. While prior works mostly rely on human feedback in the form of comparisons, language is a preferable modality that provides more informative insights into user preferences. In this work, we aim to incorporate comparative language feedback to iteratively improve robot trajectories and to learn reward functions that encode human preferences. To achieve this goal, we learn a shared latent space that integrates trajectory data and language feedback, and subsequently leverage the learned latent space to improve trajectories and learn human preferences. To the best of our knowledge, we are the first to incorporate comparative language feedback into reward learning. Our simulation experiments demonstrate the effectiveness of the learned latent space and the success of our learning algorithms. We also conduct human subject studies that show our reward learning algorithm achieves a 23.9% higher subjective score on average and is 11.3% more time-efficient compared to preference-based reward learning, underscoring the superior performance of our method. Our website is at https://liralab.usc.edu/comparative-language-feedback/