 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrain What You Know -- Precise Pick-and-Place with Transporter Networks
Paper and Code
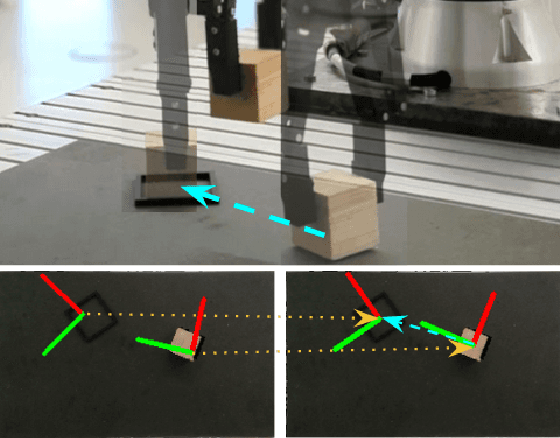
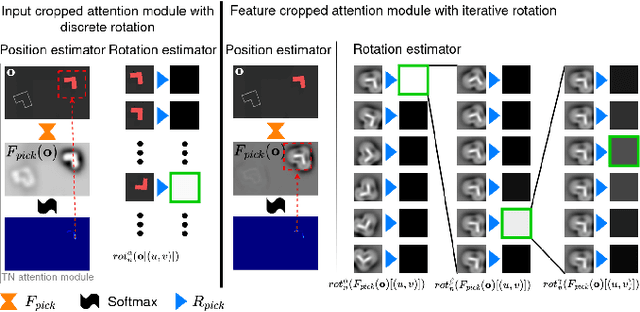
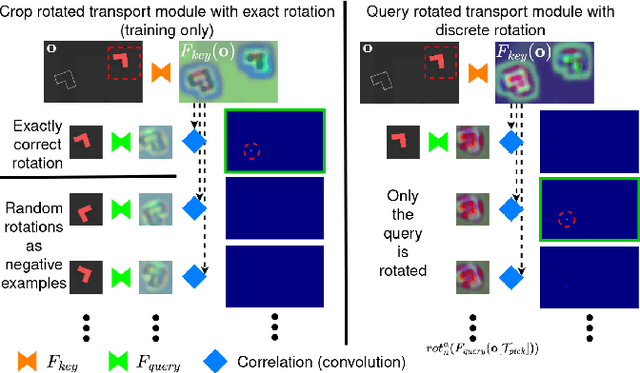
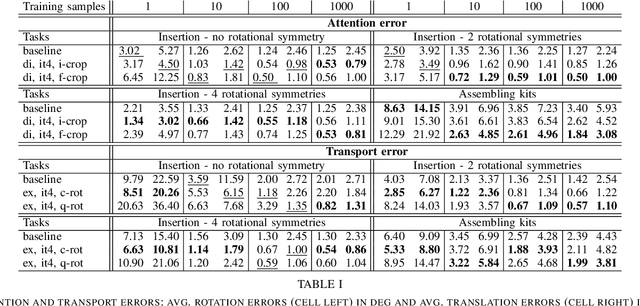
Precise pick-and-place is essential in robotic applications. To this end, we define a novel exact training method and an iterative inference method that improve pick-and-place precision with Transporter Networks. We conduct a large scale experiment on 8 simulated tasks. A systematic analysis shows, that the proposed modifications have a significant positive effect on model performance. Considering picking and placing independently, our methods achieve up to 60% lower rotation and translation errors than baselines. For the whole pick-and-place process we observe 50% lower rotation errors for most tasks with slight improvements in terms of translation errors. Furthermore, we propose architectural changes that retain model performance and reduce computational costs and time. We validate our methods with an interactive teaching procedure on real hardware. Supplementary material will be made available at: https://gergely-soti.github.io/p