 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracker Meets Night: A Transformer Enhancer for UAV Tracking
Paper and Code
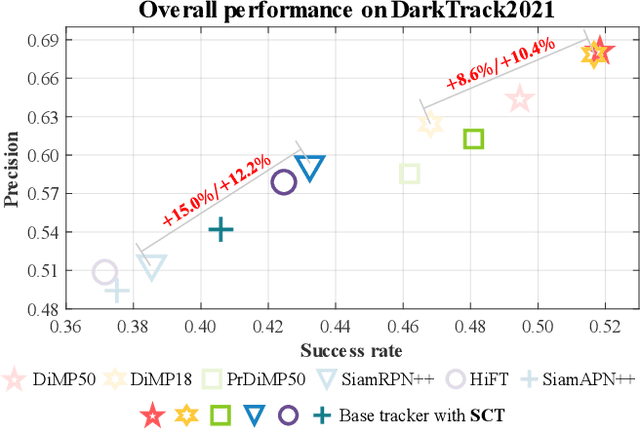
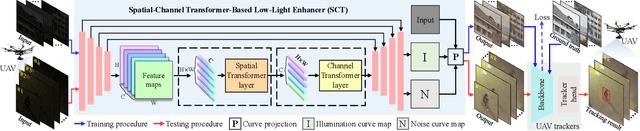
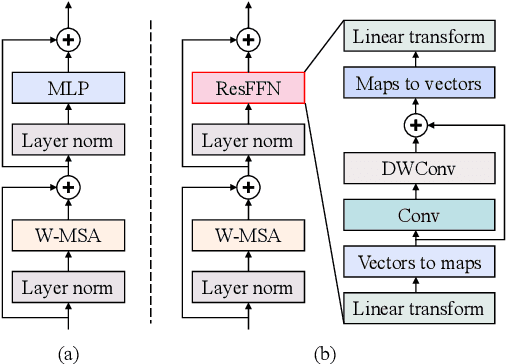
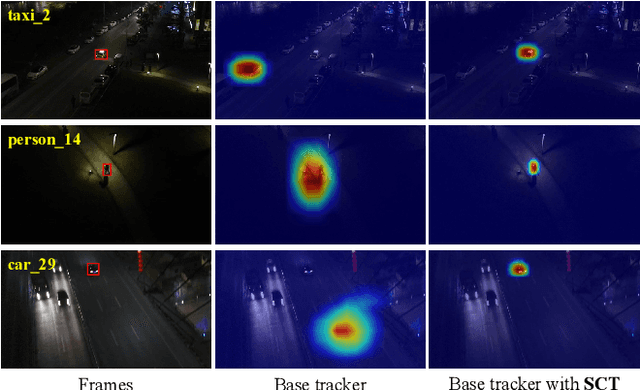
Most previous progress in object tracking is realized in daytime scenes with favorable illumination. State-of-the-arts can hardly carry on their superiority at night so far, thereby considerably blocking the broadening of visual tracking-related unmanned aerial vehicle (UAV) applications. To realize reliable UAV tracking at night, a spatial-channel Transformer-based low-light enhancer (namely SCT), which is trained in a novel task-inspired manner, is proposed and plugged prior to tracking approaches. To achieve semantic-level low-light enhancement targeting the high-level task, the novel spatial-channel attention module is proposed to model global information while preserving local context. In the enhancement process, SCT denoises and illuminates nighttime images simultaneously through a robust non-linear curve projection. Moreover, to provide a comprehensive evaluation, we construct a challenging nighttime tracking benchmark, namely DarkTrack2021, which contains 110 challenging sequences with over 100 K frames in total. Evaluations on both the public UAVDark135 benchmark and the newly constructed DarkTrack2021 benchmark show that the task-inspired design enables SCT with significant performance gains for nighttime UAV tracking compared with other top-ranked low-light enhancers. Real-world tests on a typical UAV platform further verify the practicability of the proposed approach. The DarkTrack2021 benchmark and the code of the proposed approach are publicly available at https://github.com/vision4robotics/SCT.