 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrack without Appearance: Learn Box and Tracklet Embedding with Local and Global Motion Patterns for Vehicle Tracking
Paper and Code
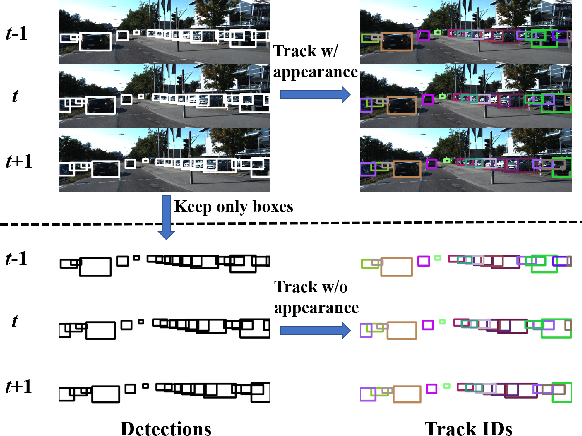
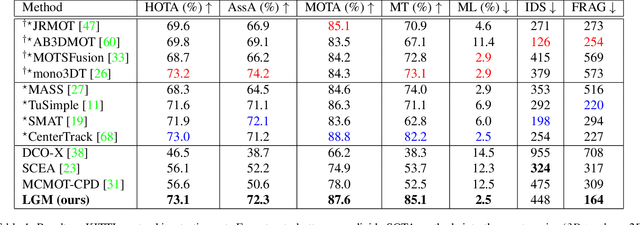

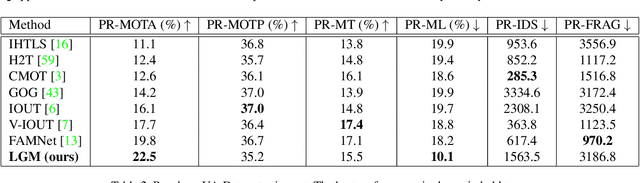
Vehicle tracking is an essential task in the multi-object tracking (MOT) field. A distinct characteristic in vehicle tracking is that the trajectories of vehicles are fairly smooth in both the world coordinate and the image coordinate. Hence, models that capture motion consistencies are of high necessity. However, tracking with the standalone motion-based trackers is quite challenging because targets could get lost easily due to limited information, detection error and occlusion. Leveraging appearance information to assist object re-identification could resolve this challenge to some extent. However, doing so requires extra computation while appearance information is sensitive to occlusion as well. In this paper, we try to explore the significance of motion patterns for vehicle tracking without appearance information. We propose a novel approach that tackles the association issue for long-term tracking with the exclusive fully-exploited motion information. We address the tracklet embedding issue with the proposed reconstruct-to-embed strategy based on deep graph convolutional neural networks (GCN). Comprehensive experiments on the KITTI-car tracking dataset and UA-Detrac dataset show that the proposed method, though without appearance information, could achieve competitive performance with the state-of-the-art (SOTA) trackers. The source code will be available at https://github.com/GaoangW/LGMTracker.