 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-captured Scenarios
Paper and Code
Aug 26, 2021
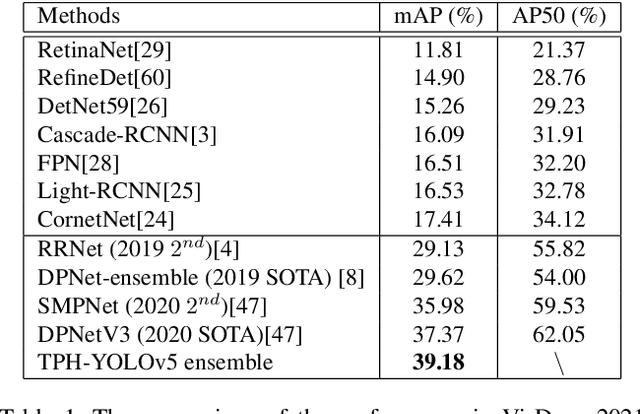
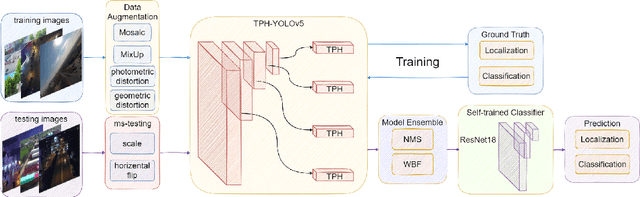
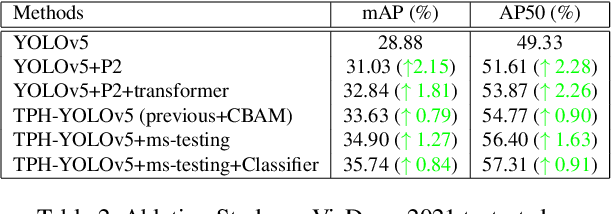
Object detection on drone-captured scenarios is a recent popular task. As drones always navigate in different altitudes, the object scale varies violently, which burdens the optimization of networks. Moreover, high-speed and low-altitude flight bring in the motion blur on the densely packed objects, which leads to great challenge of object distinction. To solve the two issues mentioned above, we propose TPH-YOLOv5. Based on YOLOv5, we add one more prediction head to detect different-scale objects. Then we replace the original prediction heads with Transformer Prediction Heads (TPH) to explore the prediction potential with self-attention mechanism. We also integrate convolutional block attention model (CBAM) to find attention region on scenarios with dense objects. To achieve more improvement of our proposed TPH-YOLOv5, we provide bags of useful strategies such as data augmentation, multiscale testing, multi-model integration and utilizing extra classifier. Extensive experiments on dataset VisDrone2021 show that TPH-YOLOv5 have good performance with impressive interpretability on drone-captured scenarios. On DET-test-challenge dataset, the AP result of TPH-YOLOv5 are 39.18%, which is better than previous SOTA method (DPNetV3) by 1.81%. On VisDrone Challenge 2021, TPHYOLOv5 wins 5th place and achieves well-matched results with 1st place model (AP 39.43%). Compared to baseline model (YOLOv5), TPH-YOLOv5 improves about 7%, which is encouraging and competitive.