 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Safety-Aware Computing System Design in Autonomous Vehicles
Paper and Code
May 22, 2019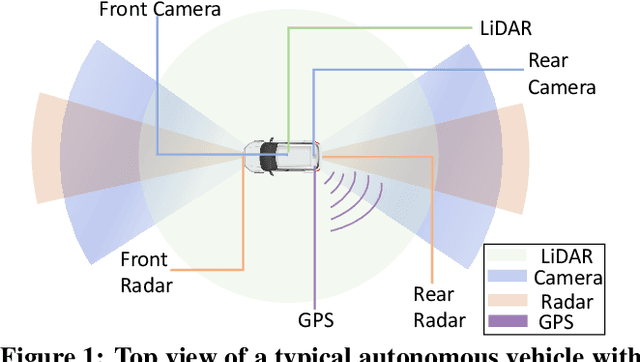
Recently, autonomous driving development ignited competition among car makers and technical corporations. Low-level automation cars are already commercially available. But high automated vehicles where the vehicle drives by itself without human monitoring is still at infancy. Such autonomous vehicles (AVs) rely on the computing system in the car to to interpret the environment and make driving decisions. Therefore, computing system design is essential particularly in enhancing the attainment of driving safety. However, to our knowledge, no clear guideline exists so far regarding safety-aware AV computing system and architecture design. To understand the safety requirement of AV computing system, we performed a field study by running industrial Level-4 autonomous driving fleets in various locations, road conditions, and traffic patterns. The field study indicates that traditional computing system performance metrics, such as tail latency, average latency, maximum latency, and timeout, cannot fully satisfy the safety requirement for AV computing system design. To address this issue, we propose a `safety score' as a primary metric for measuring the level of safety in AV computing system design. Furthermore, we propose a perception latency model, which helps architects estimate the safety score of given architecture and system design without physically testing them in an AV. We demonstrate the use of our safety score and latency model, by developing and evaluating a safety-aware AV computing system computation hardware resource management scheme.