 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Improving Calibration in Object Detection Under Domain Shift
Paper and Code
Sep 15, 2022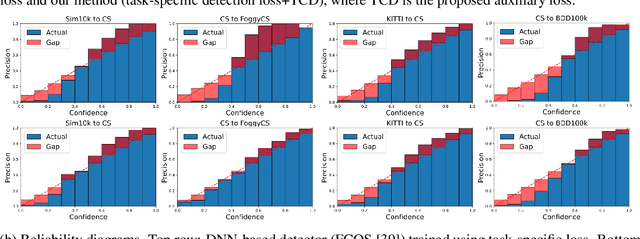

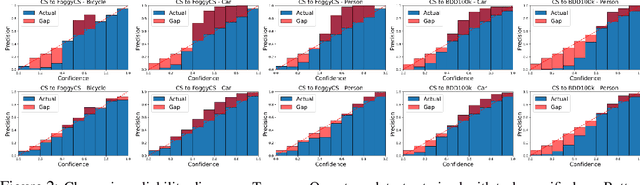
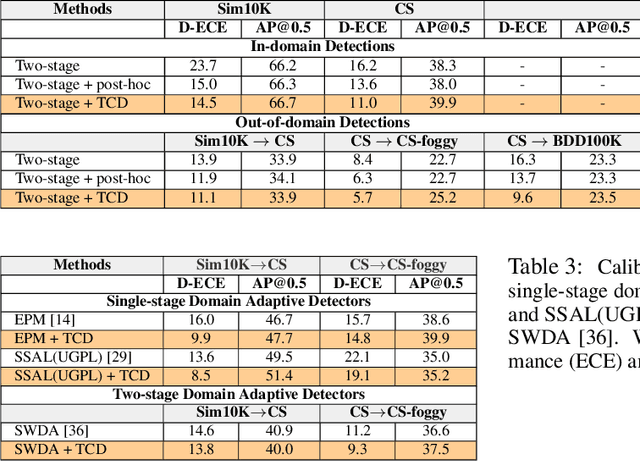
The increasing use of deep neural networks in safety-critical applications requires the trained models to be well-calibrated. Most current calibration techniques address classification problems while focusing on improving calibration on in-domain predictions. Little to no attention is paid towards addressing calibration of visual object detectors which occupy similar space and importance in many decision making systems. In this paper, we study the calibration of current object detection models, particularly under domain shift. To this end, we first introduce a plug-and-play train-time calibration loss for object detection. It can be used as an auxiliary loss function to improve detector's calibration. Second, we devise a new uncertainty quantification mechanism for object detection which can implicitly calibrate the commonly used self-training based domain adaptive detectors. We include in our study both single-stage and two-stage object detectors. We demonstrate that our loss improves calibration for both in-domain and out-of-domain detections with notable margins. Finally, we show the utility of our techniques in calibrating the domain adaptive object detectors in diverse domain shift scenarios.