 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Gradient-based Bilevel Optimization with Non-convex Followers and Beyond
Paper and Code
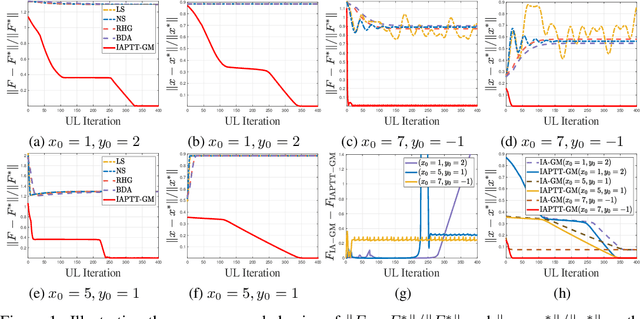

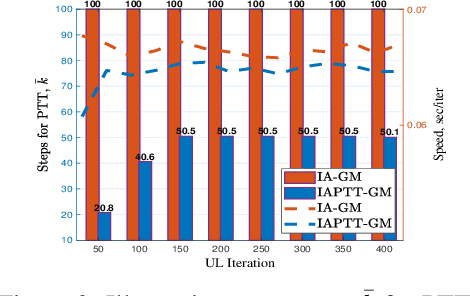
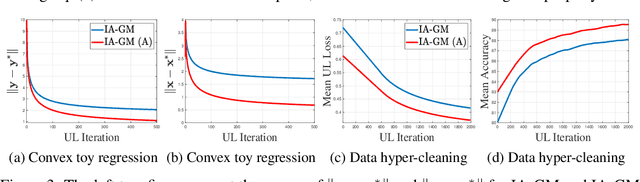
In recent years, Bi-Level Optimization (BLO) techniques have received extensive attentions from both learning and vision communities. A variety of BLO models in complex and practical tasks are of non-convex follower structure in nature (a.k.a., without Lower-Level Convexity, LLC for short). However, this challenging class of BLOs is lack of developments on both efficient solution strategies and solid theoretical guarantees. In this work, we propose a new algorithmic framework, named Initialization Auxiliary and Pessimistic Trajectory Truncated Gradient Method (IAPTT-GM), to partially address the above issues. In particular, by introducing an auxiliary as initialization to guide the optimization dynamics and designing a pessimistic trajectory truncation operation, we construct a reliable approximate version of the original BLO in the absence of LLC hypothesis. Our theoretical investigations establish the convergence of solutions returned by IAPTT-GM towards those of the original BLO without LLC. As an additional bonus, we also theoretically justify the quality of our IAPTT-GM embedded with Nesterov's accelerated dynamics under LLC. The experimental results confirm both the convergence of our algorithm without LLC, and the theoretical findings under LLC.