 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Disturbance-Free Visual Mobile Manipulation
Paper and Code
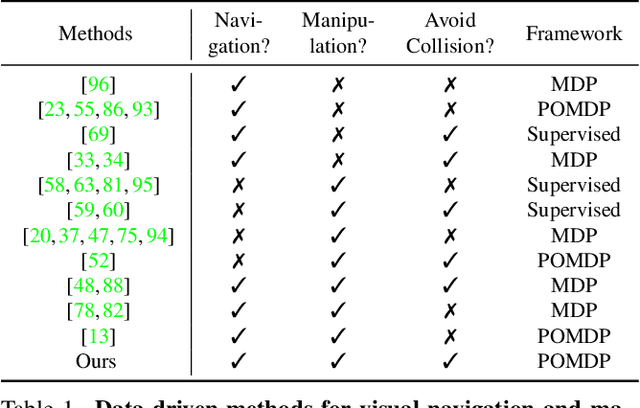
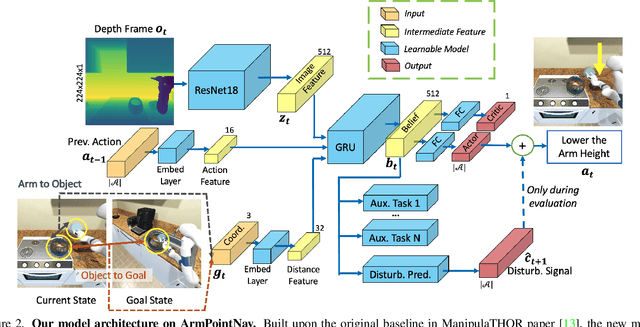
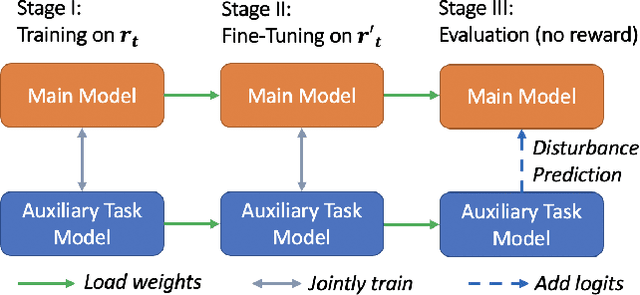
Embodied AI has shown promising results on an abundance of robotic tasks in simulation, including visual navigation and manipulation. The prior work generally pursues high success rates with shortest paths while largely ignoring the problems caused by collision during interaction. This lack of prioritization is understandable: in simulated environments there is no inherent cost to breaking virtual objects. As a result, well-trained agents frequently have catastrophic collision with objects despite final success. In the robotics community, where the cost of collision is large, collision avoidance is a long-standing and crucial topic to ensure that robots can be safely deployed in the real world. In this work, we take the first step towards collision/disturbance-free embodied AI agents for visual mobile manipulation, facilitating safe deployment in real robots. We develop a new disturbance-avoidance methodology at the heart of which is the auxiliary task of disturbance prediction. When combined with a disturbance penalty, our auxiliary task greatly enhances sample efficiency and final performance by knowledge distillation of disturbance into the agent. Our experiments on ManipulaTHOR show that, on testing scenes with novel objects, our method improves the success rate from 61.7% to 85.6% and the success rate without disturbance from 29.8% to 50.2% over the original baseline. Extensive ablation studies show the value of our pipelined approach. Project site is at https://sites.google.com/view/disturb-free