 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Cross-View-Consistent Self-Supervised Surround Depth Estimation
Paper and Code
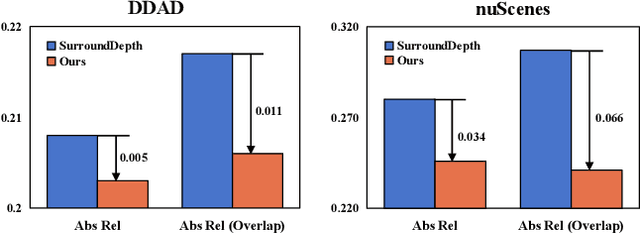
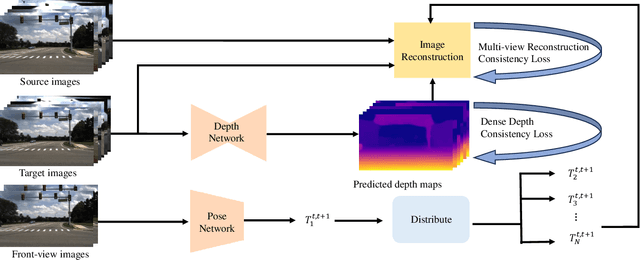
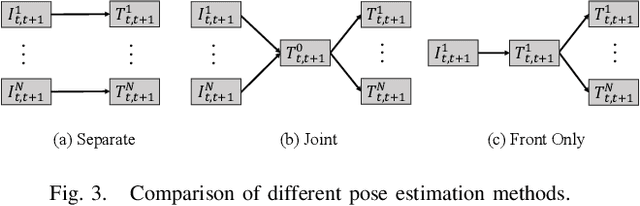
Depth estimation is a cornerstone for autonomous driving, yet acquiring per-pixel depth ground truth for supervised learning is challenging. Self-Supervised Surround Depth Estimation (SSSDE) from consecutive images offers an economical alternative. While previous SSSDE methods have proposed different mechanisms to fuse information across images, few of them explicitly consider the cross-view constraints, leading to inferior performance, particularly in overlapping regions. This paper proposes an efficient and consistent pose estimation design and two loss functions to enhance cross-view consistency for SSSDE. For pose estimation, we propose to use only front-view images to reduce training memory and sustain pose estimation consistency. The first loss function is the dense depth consistency loss, which penalizes the difference between predicted depths in overlapping regions. The second one is the multi-view reconstruction consistency loss, which aims to maintain consistency between reconstruction from spatial and spatial-temporal contexts. Additionally, we introduce a novel flipping augmentation to improve the performance further. Our techniques enable a simple neural model to achieve state-of-the-art performance on the DDAD and nuScenes datasets. Last but not least, our proposed techniques can be easily applied to other methods. The code will be made public.