 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Collaborative Simultaneous Localization and Mapping: a Survey of the Current Research Landscape
Paper and Code
Aug 18, 2021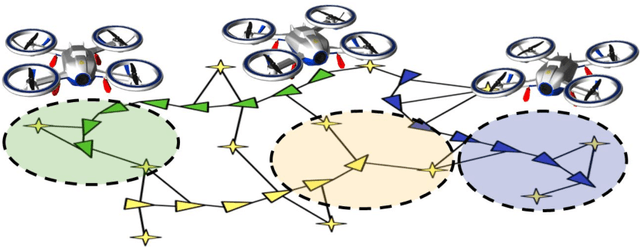
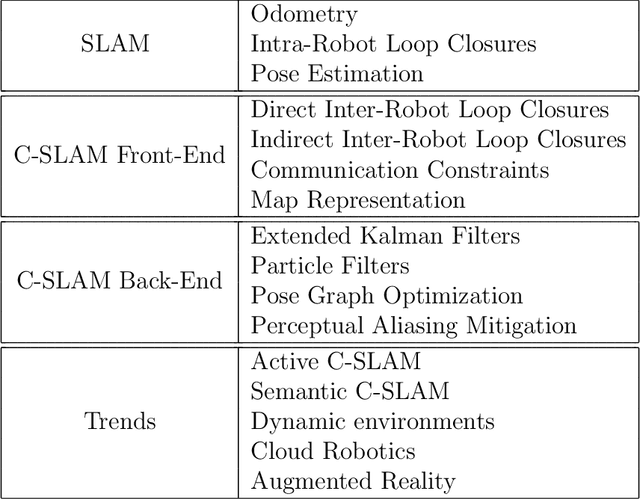

Motivated by the tremendous progress we witnessed in recent years, this paper presents a survey of the scientific literature on the topic of Collaborative Simultaneous Localization and Mapping (C-SLAM), also known as multi-robot SLAM. With fleets of self-driving cars on the horizon and the rise of multi-robot systems in industrial applications, we believe that Collaborative SLAM will soon become a cornerstone of future robotic applications. In this survey, we introduce the basic concepts of C-SLAM and present a thorough literature review. We also outline the major challenges and limitations of C-SLAM in terms of robustness, communication, and resource management. We conclude by exploring the area's current trends and promising research avenues.