 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Automatic Manipulation of Intra-cardiac Echocardiography Catheter
Paper and Code
Sep 12, 2020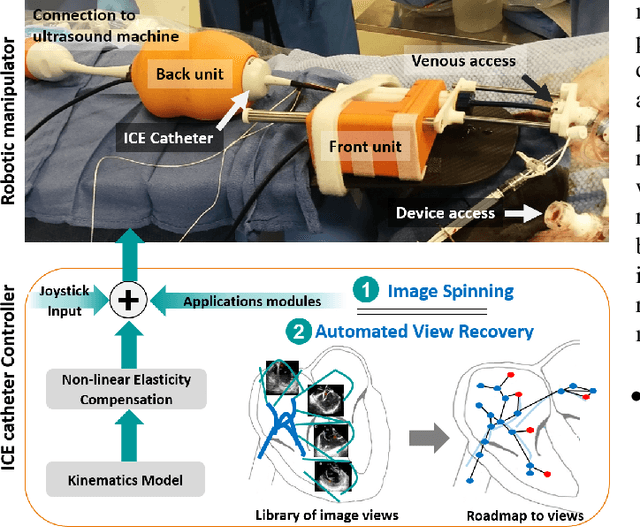
Intra-cardiac Echocardiography (ICE) has been evolving as a real-time imaging modality of choice for guiding electrophiosology and structural heart interventions. ICE provides real-time imaging of anatomy, catheters, and complications such as pericardial effusion or thrombus formation. However, there now exists a high cognitive demand on physicians with the increased reliance on intraprocedural imaging. In response, we present a robotic manipulator for AcuNav ICE catheters to alleviate the physician's burden and support applied methods for more automated. Herein, we introduce two methods towards these goals: (1) a data-driven method to compensate kinematic model errors due to non-linear elasticity in catheter bending, providing more precise robotic control and (2) an automated image recovery process that allows physicians to bookmark images during intervention and automatically return with the push of a button. To validate our error compensation method, we demonstrate a complex rotation of the ultrasound imaging plane evaluated on benchtop. Automated view recovery is validated by repeated imaging of landmarks on benchtop and in vivo experiments with position- and image-based analysis. Results support that a robotic-assist system for more autonomous ICE can provide a safe and efficient tool, potentially reducing the execution time and allowing more complex procedures to become common place.