 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouchRoller: A Rolling Optical Tactile Sensor for Rapid Assessment of Large Surfaces
Paper and Code
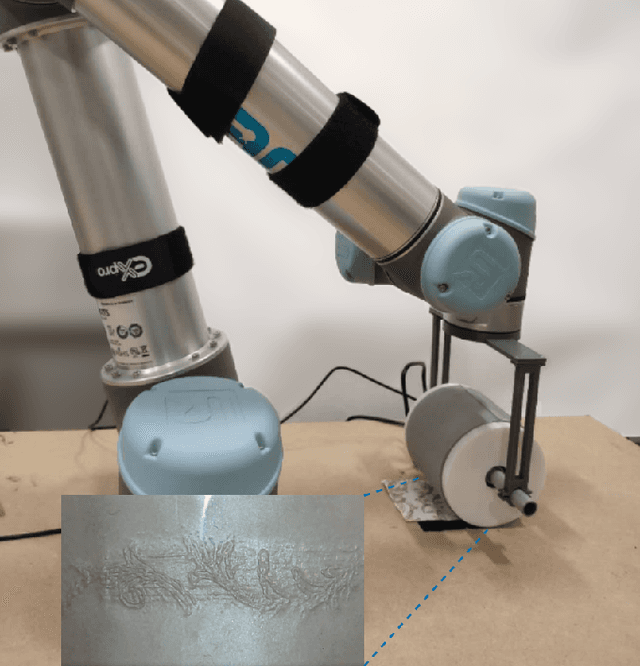
Tactile sensing is important for robots to perceive the world as it captures the texture and hardness of the object in contact and is robust to illumination and colour variances. However, due to the limited sensing area and the resistance of the fixed surface, current tactile sensors have to tap the tactile sensor on target object many times when assessing a large surface, i.e., pressing, lifting up and shifting to another region. This process is ineffective and time consuming. It is also undesirable to drag such sensors as this often damages the sensitive membrane of the sensor or the object. To address these problems, we propose a cylindrical optical tactile sensor named TouchRoller that can roll around its center axis. It maintains being in contact with the assessed surface throughout the entire motion, which allows for measuring the object continuously and effectively. Extensive experiments show that the TouchRoller sensor can cover a textured surface of 8cm*11cm in a short time of 10s, much more effectively than a flat optical tactile sensor (in 196s). The reconstructed map of the texture from the collected tactile images has a high Structural Similarity Index (SSIM) of 0.31 on average, when compared with the visual texture. In addition, the contacts on the sensor can be localised with a low localisation error, 2.63mm in the center regions and 7.66mm on average. The proposed sensor will enable the fast assessment of large surfaces with high-resolution tactile sensing, and also the effective collection of tactile images.