 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTop Down Approach to Multiple Plane Detection
Paper and Code
Dec 26, 2013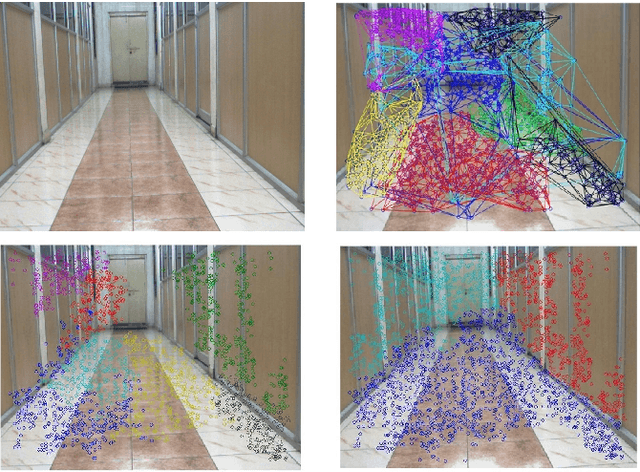
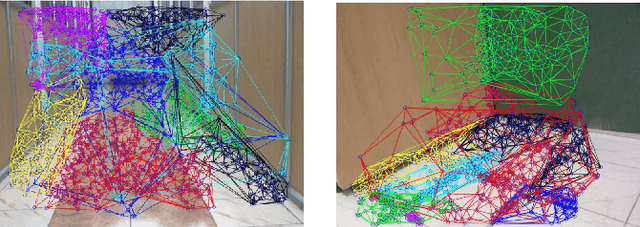
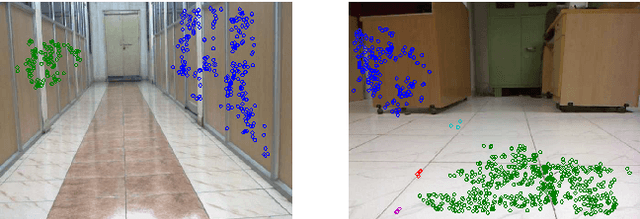
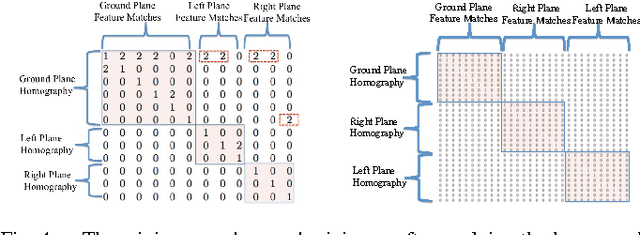
Detecting multiple planes in images is a challenging problem, but one with many applications. Recent work such as J-Linkage and Ordered Residual Kernels have focussed on developing a domain independent approach to detect multiple structures. These multiple structure detection methods are then used for estimating multiple homographies given feature matches between two images. Features participating in the multiple homographies detected, provide us the multiple scene planes. We show that these methods provide locally optimal results and fail to merge detected planar patches to the true scene planes. These methods use only residues obtained on applying homography of one plane to another as cue for merging. In this paper, we develop additional cues such as local consistency of planes, local normals, texture etc. to perform better classification and merging . We formulate the classification as an MRF problem and use TRWS message passing algorithm to solve non metric energy terms and complex sparse graph structure. We show results on challenging dataset common in robotics navigation scenarios where our method shows accuracy of more than 85 percent on average while being close or same as the actual number of scene planes.