 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Go or Not To Go? A Near Unsupervised Learning Approach For Robot Navigation
Paper and Code
Sep 16, 2017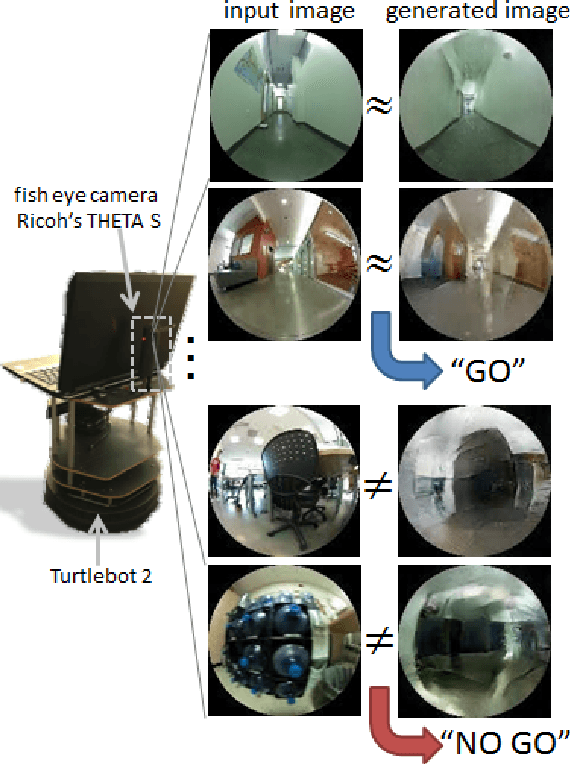

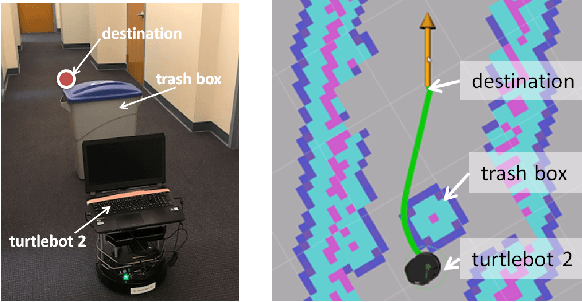

It is important for robots to be able to decide whether they can go through a space or not, as they navigate through a dynamic environment. This capability can help them avoid injury or serious damage, e.g., as a result of running into people and obstacles, getting stuck, or falling off an edge. To this end, we propose an unsupervised and a near-unsupervised method based on Generative Adversarial Networks (GAN) to classify scenarios as traversable or not based on visual data. Our method is inspired by the recent success of data-driven approaches on computer vision problems and anomaly detection, and reduces the need for vast amounts of negative examples at training time. Collecting negative data indicating that a robot should not go through a space is typically hard and dangerous because of collisions, whereas collecting positive data can be automated and done safely based on the robot's own traveling experience. We verify the generality and effectiveness of the proposed approach on a test dataset collected in a previously unseen environment with a mobile robot. Furthermore, we show that our method can be used to build costmaps (we call as "GoNoGo" costmaps) for robot path planning using visual data only.