 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe CoSTAR Block Stacking Dataset: Learning with Workspace Constraints
Paper and Code
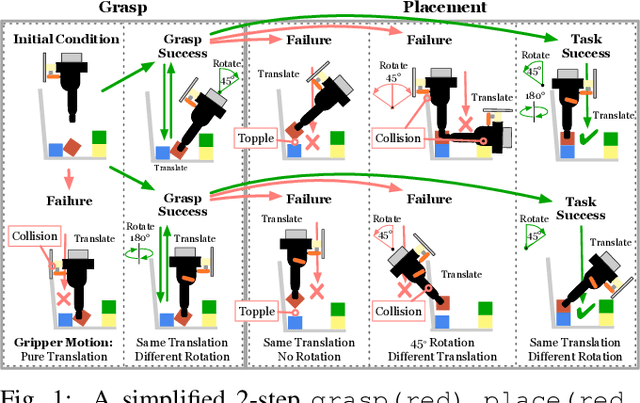
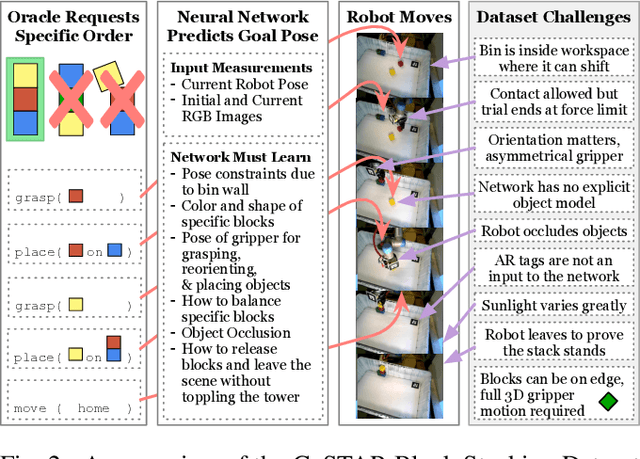
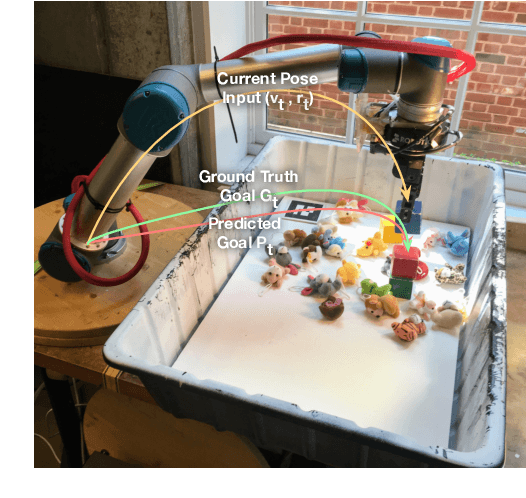
A robot can now grasp an object more effectively than ever before, but once it has the object what happens next? We show that a mild relaxation of the task and workspace constraints implicit in existing object grasping datasets can cause neural network based grasping algorithms to fail on even a simple block stacking task when executed under more realistic circumstances. To address this, we introduce the JHU CoSTAR Block Stacking Dataset (BSD), where a robot interacts with 5.1 cm colored blocks to complete an order-fulfillment style block stacking task. It contains dynamic scenes and real time-series data in a less constrained environment than comparable datasets. There are nearly 12,000 stacking attempts and over 2 million frames of real data. We discuss the ways in which this dataset provides a valuable resource for a broad range of other topics of investigation. We find that hand-designed neural networks that work on prior datasets do not generalize to this task. Thus, to establish a baseline for this dataset, we demonstrate an automated search of neural network based models using a novel multiple-input HyperTree MetaModel, and find a final model which makes reasonable 3D pose predictions for grasping and stacking on our dataset. The CoSTAR BSD, code, and instructions are available at https://sites.google.com/site/costardataset.