 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Driven In-Hand Manipulation of Unknown Objects with Tactile Sensing
Paper and Code
Oct 28, 2022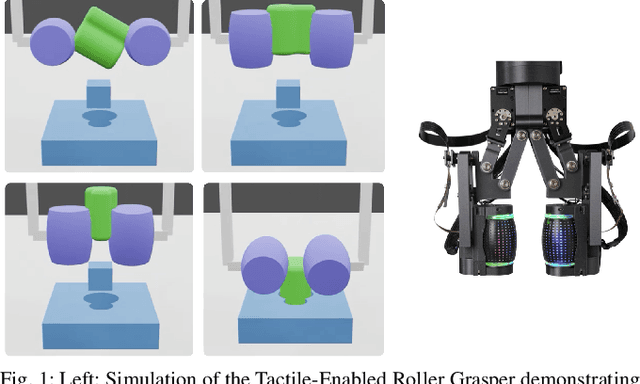
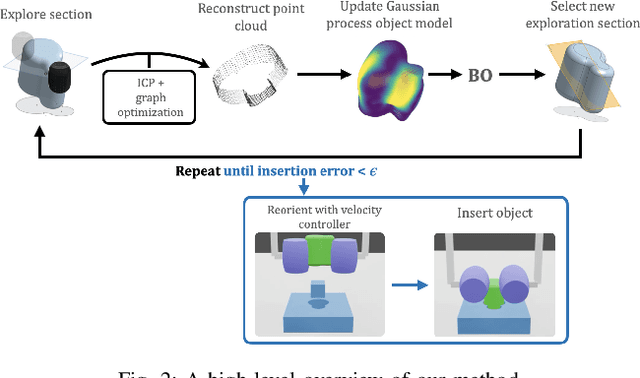
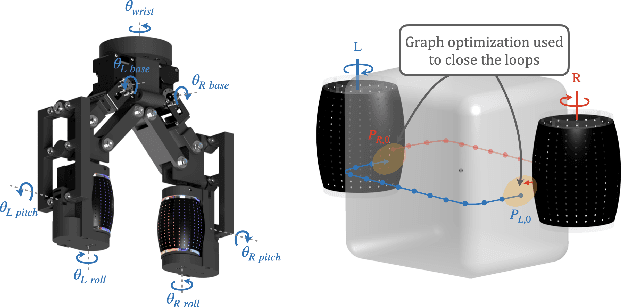
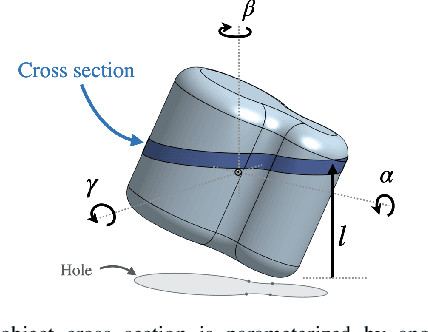
Manipulation of objects in-hand without an object model is a foundational skill for many tasks in unstructured environments. In many cases, vision-only approaches may not be feasible; for example, due to occlusion in cluttered spaces. In this paper, we introduce a method to reorient unknown objects by incrementally building a probabilistic estimate of the object shape and pose during task-driven manipulation. Our method leverages Bayesian optimization to strategically trade-off exploration of the global object shape with efficient task completion. We demonstrate our approach on a Tactile-Enabled Roller Grasper, a gripper that rolls objects in hand while continuously collecting tactile data. We evaluate our method in simulation on a set of randomly generated objects and find that our method reliably reorients objects while significantly reducing the exploration time needed to do so. On the Roller Grasper hardware, we show successful qualitative reconstruction of the object model. In summary, this work (1) presents a system capable of simultaneously learning unknown 3D object shape and pose using tactile sensing; and (2) demonstrates that task-driven exploration results in more efficient object manipulation than the common paradigm of complete object exploration before task-completion.