 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymbolic Visual Reinforcement Learning: A Scalable Framework with Object-Level Abstraction and Differentiable Expression Search
Paper and Code
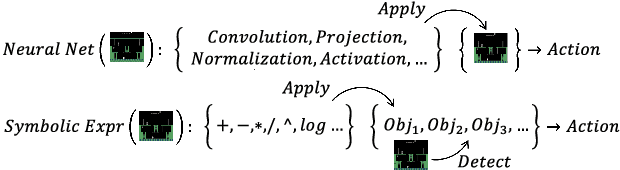
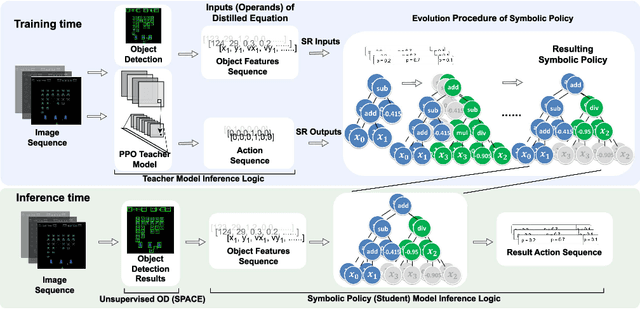
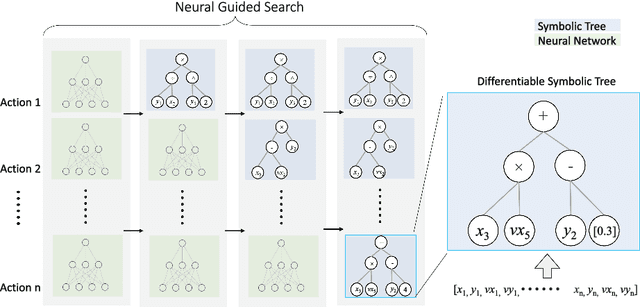
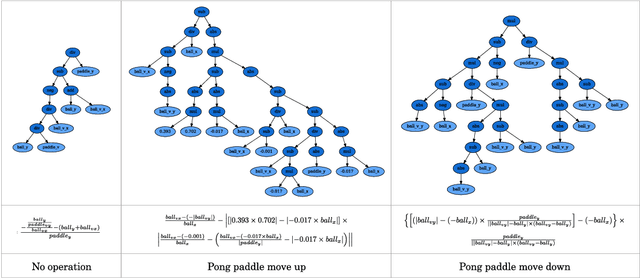
Learning efficient and interpretable policies has been a challenging task in reinforcement learning (RL), particularly in the visual RL setting with complex scenes. While neural networks have achieved competitive performance, the resulting policies are often over-parameterized black boxes that are difficult to interpret and deploy efficiently. More recent symbolic RL frameworks have shown that high-level domain-specific programming logic can be designed to handle both policy learning and symbolic planning. However, these approaches rely on coded primitives with little feature learning, and when applied to high-dimensional visual scenes, they can suffer from scalability issues and perform poorly when images have complex object interactions. To address these challenges, we propose \textit{Differentiable Symbolic Expression Search} (DiffSES), a novel symbolic learning approach that discovers discrete symbolic policies using partially differentiable optimization. By using object-level abstractions instead of raw pixel-level inputs, DiffSES is able to leverage the simplicity and scalability advantages of symbolic expressions, while also incorporating the strengths of neural networks for feature learning and optimization. Our experiments demonstrate that DiffSES is able to generate symbolic policies that are simpler and more and scalable than state-of-the-art symbolic RL methods, with a reduced amount of symbolic prior knowledge.