 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymbol Emergence in Robotics: A Survey
Paper and Code
Sep 29, 2015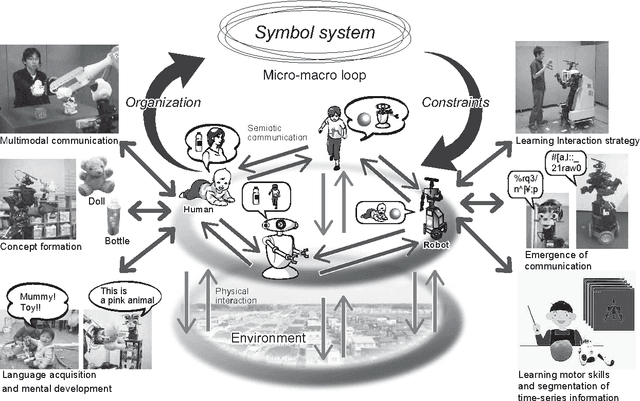
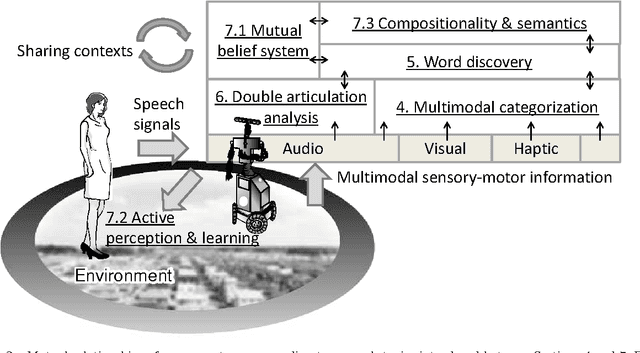

Humans can learn the use of language through physical interaction with their environment and semiotic communication with other people. It is very important to obtain a computational understanding of how humans can form a symbol system and obtain semiotic skills through their autonomous mental development. Recently, many studies have been conducted on the construction of robotic systems and machine-learning methods that can learn the use of language through embodied multimodal interaction with their environment and other systems. Understanding human social interactions and developing a robot that can smoothly communicate with human users in the long term, requires an understanding of the dynamics of symbol systems and is crucially important. The embodied cognition and social interaction of participants gradually change a symbol system in a constructive manner. In this paper, we introduce a field of research called symbol emergence in robotics (SER). SER is a constructive approach towards an emergent symbol system. The emergent symbol system is socially self-organized through both semiotic communications and physical interactions with autonomous cognitive developmental agents, i.e., humans and developmental robots. Specifically, we describe some state-of-art research topics concerning SER, e.g., multimodal categorization, word discovery, and a double articulation analysis, that enable a robot to obtain words and their embodied meanings from raw sensory--motor information, including visual information, haptic information, auditory information, and acoustic speech signals, in a totally unsupervised manner. Finally, we suggest future directions of research in SER.