 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgPointTransformer: Vertebrae Shape Completion with RGB-D Data
Paper and Code
Oct 02, 2024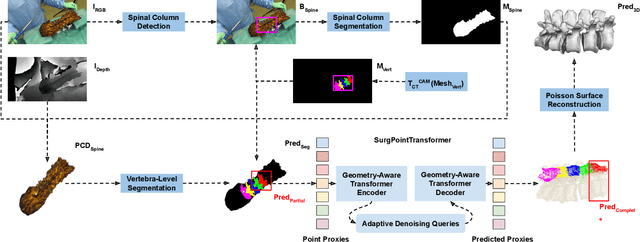
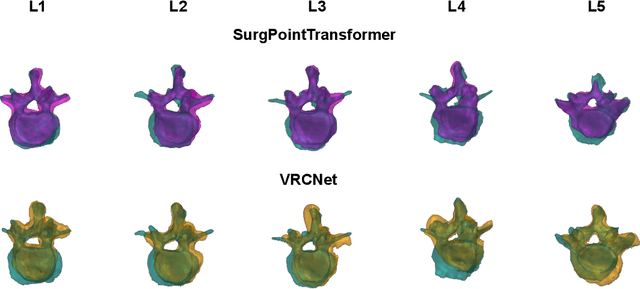
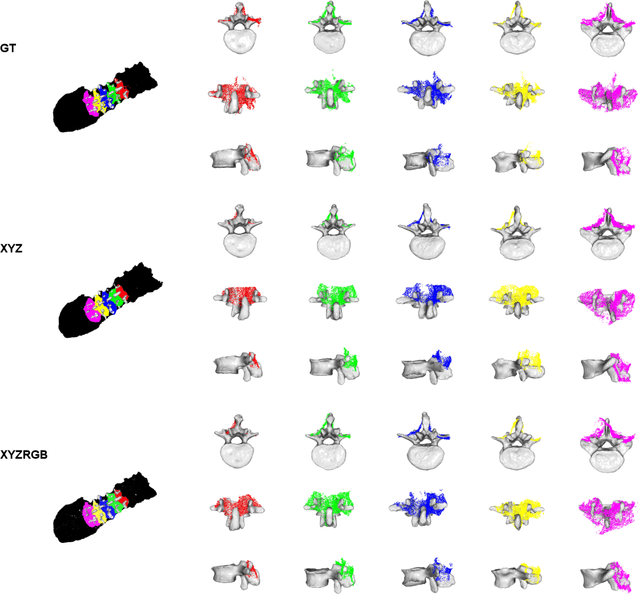
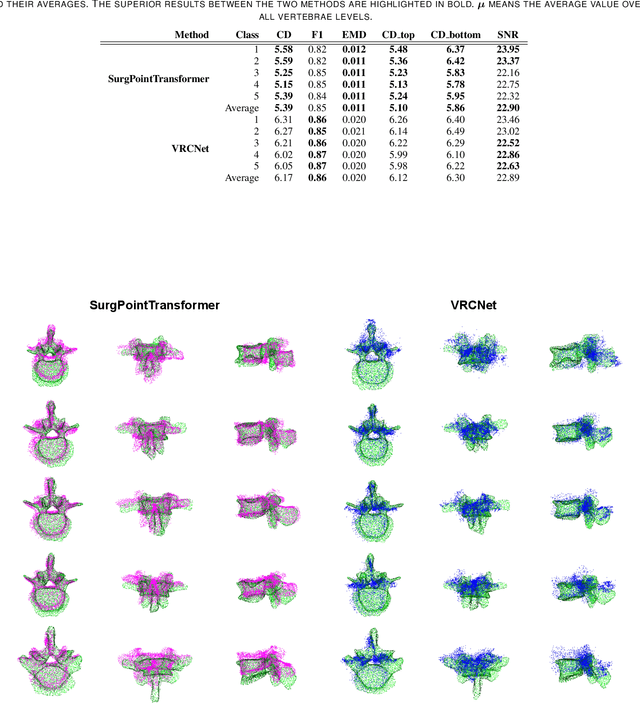
State-of-the-art computer- and robot-assisted surgery systems heavily depend on intraoperative imaging technologies such as CT and fluoroscopy to generate detailed 3D visualization of the patient's anatomy. While imaging techniques are highly accurate, they are based on ionizing radiation and expose patients and clinicians. This study introduces an alternative, radiation-free approach for reconstructing the 3D spine anatomy using RGB-D data. Drawing inspiration from the 3D "mental map" that surgeons form during surgeries, we introduce SurgPointTransformer, a shape completion approach for surgical applications that can accurately reconstruct the unexposed spine regions from sparse observations of the exposed surface. Our method involves two main steps: segmentation and shape completion. The segmentation step includes spinal column localization and segmentation, followed by vertebra-wise segmentation. The segmented vertebra point clouds are then subjected to SurgPointTransformer, which leverages an attention mechanism to learn patterns between visible surface features and the underlying anatomy. For evaluation, we utilize an ex-vivo dataset of nine specimens. Their CT data is used to establish ground truth data that were used to compare to the outputs of our methods. Our method significantly outperforms the state-of-the-art baselines, achieving an average Chamfer Distance of 5.39, an F-Score of 0.85, an Earth Mover's Distance of 0.011, and a Signal-to-Noise Ratio of 22.90 dB. This study demonstrates the potential of our reconstruction method for 3D vertebral shape completion. It enables 3D reconstruction of the entire lumbar spine and surgical guidance without ionizing radiation or invasive imaging. Our work contributes to computer-aided and robot-assisted surgery, advancing the perception and intelligence of these systems.