 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurface Reconstruction from Point Clouds by Learning Predictive Context Priors
Paper and Code


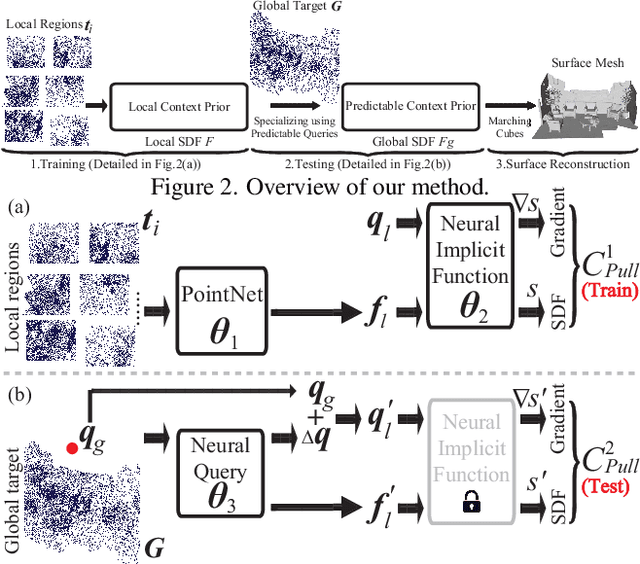

Surface reconstruction from point clouds is vital for 3D computer vision. State-of-the-art methods leverage large datasets to first learn local context priors that are represented as neural network-based signed distance functions (SDFs) with some parameters encoding the local contexts. To reconstruct a surface at a specific query location at inference time, these methods then match the local reconstruction target by searching for the best match in the local prior space (by optimizing the parameters encoding the local context) at the given query location. However, this requires the local context prior to generalize to a wide variety of unseen target regions, which is hard to achieve. To resolve this issue, we introduce Predictive Context Priors by learning Predictive Queries for each specific point cloud at inference time. Specifically, we first train a local context prior using a large point cloud dataset similar to previous techniques. For surface reconstruction at inference time, however, we specialize the local context prior into our Predictive Context Prior by learning Predictive Queries, which predict adjusted spatial query locations as displacements of the original locations. This leads to a global SDF that fits the specific point cloud the best. Intuitively, the query prediction enables us to flexibly search the learned local context prior over the entire prior space, rather than being restricted to the fixed query locations, and this improves the generalizability. Our method does not require ground truth signed distances, normals, or any additional procedure of signed distance fusion across overlapping regions. Our experimental results in surface reconstruction for single shapes or complex scenes show significant improvements over the state-of-the-art under widely used benchmarks.