 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTRAP: Robot Sub-Trajectory Retrieval for Augmented Policy Learning
Paper and Code
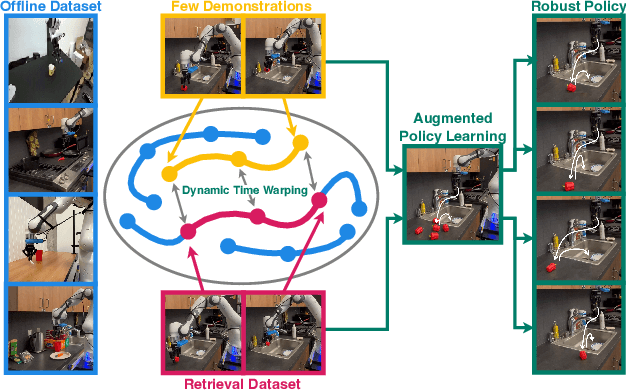
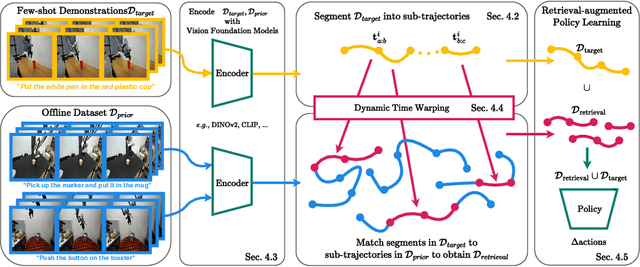
Robot learning is witnessing a significant increase in the size, diversity, and complexity of pre-collected datasets, mirroring trends in domains such as natural language processing and computer vision. Many robot learning methods treat such datasets as multi-task expert data and learn a multi-task, generalist policy by training broadly across them. Notably, while these generalist policies can improve the average performance across many tasks, the performance of generalist policies on any one task is often suboptimal due to negative transfer between partitions of the data, compared to task-specific specialist policies. In this work, we argue for the paradigm of training policies during deployment given the scenarios they encounter: rather than deploying pre-trained policies to unseen problems in a zero-shot manner, we non-parametrically retrieve and train models directly on relevant data at test time. Furthermore, we show that many robotics tasks share considerable amounts of low-level behaviors and that retrieval at the "sub"-trajectory granularity enables significantly improved data utilization, generalization, and robustness in adapting policies to novel problems. In contrast, existing full-trajectory retrieval methods tend to underutilize the data and miss out on shared cross-task content. This work proposes STRAP, a technique for leveraging pre-trained vision foundation models and dynamic time warping to retrieve sub-sequences of trajectories from large training corpora in a robust fashion. STRAP outperforms both prior retrieval algorithms and multi-task learning methods in simulated and real experiments, showing the ability to scale to much larger offline datasets in the real world as well as the ability to learn robust control policies with just a handful of real-world demonstrations.