 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Dynamic Games in Belief Space
Paper and Code
Sep 16, 2019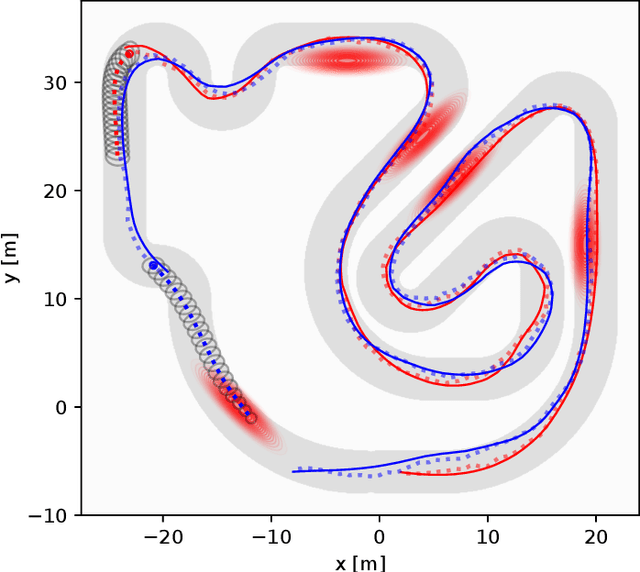
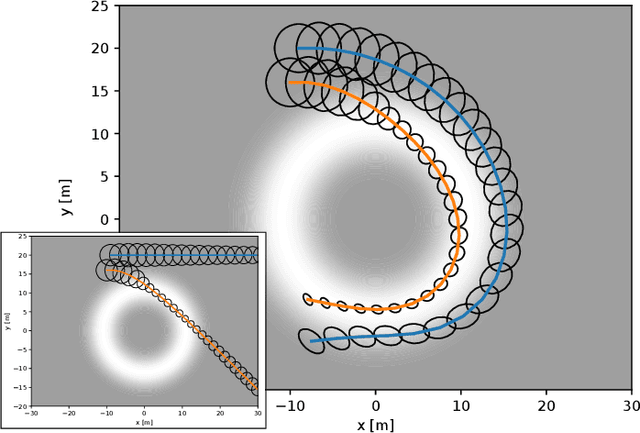
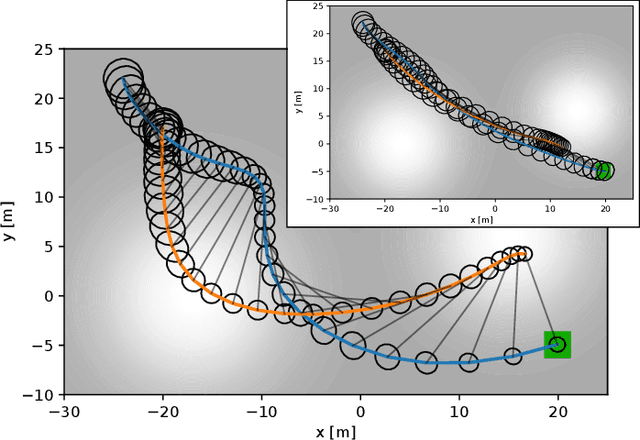
Information gathering while interacting with other agents is critical in many emerging domains, such as self-driving cars, service robots, drone racing, and active surveillance. In these interactions, the interests of agents may be at odds with others, resulting in a non-cooperative dynamic game. Since unveiling one's own strategy to adversaries is undesirable, each agent must independently predict the other agents' future actions without communication. In the face of uncertainty from sensor and actuator noise, agents have to gain information over their own state, the states of others, and the environment. They must also consider how their own actions reveal information to others. We formulate this non-cooperative multi-agent planning problem as a stochastic dynamic game. Our solution uses local iterative dynamic programming in the belief space to find a Nash equilibrium of the game. We present three applications: active surveillance, guiding eyes for a blind agent, and autonomous racing. Agents with game-theoretic belief space planning win 44% more races compared to a baseline without game theory and 34% more than without belief space planning.