 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereoscopic Universal Perturbations across Different Architectures and Datasets
Paper and Code
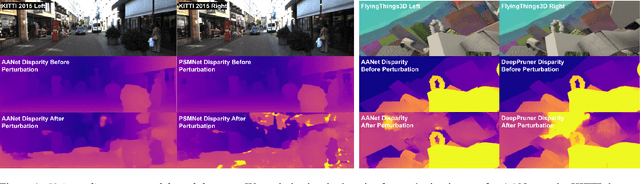
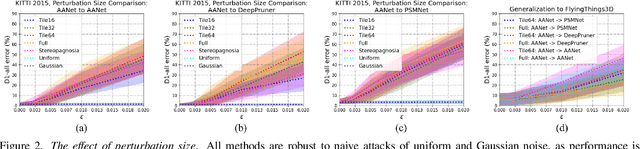
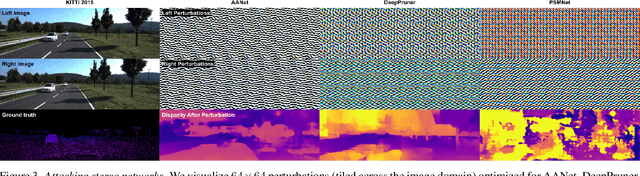
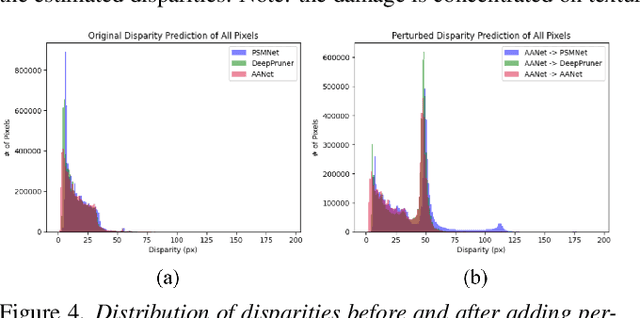
We study the effect of adversarial perturbations of images on deep stereo matching networks for the disparity estimation task. We present a method to craft a single set of perturbations that, when added to any stereo image pair in a dataset, can fool a stereo network to significantly alter the perceived scene geometry. Our perturbation images are "universal" in that they not only corrupt estimates of the network on the dataset they are optimized for, but also generalize to stereo networks with different architectures across different datasets. We evaluate our approach on multiple public benchmark datasets and show that our perturbations can increase D1-error (akin to fooling rate) of state-of-the-art stereo networks from 1% to as much as 87%. We investigate the effect of perturbations on the estimated scene geometry and identify object classes that are most vulnerable. Our analysis on the activations of registered points between left and right images led us to find that certain architectural components, i.e. deformable convolution and explicit matching, can increase robustness against adversaries. We demonstrate that by simply designing networks with such components, one can reduce the effect of adversaries by up to 60.5%, which rivals the robustness of networks fine-tuned with costly adversarial data augmentation.