 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStackelberg Strategic Guidance for Heterogeneous Robots Collaboration
Paper and Code
Feb 03, 2022

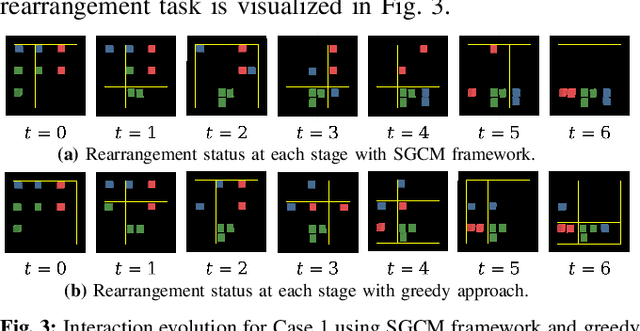
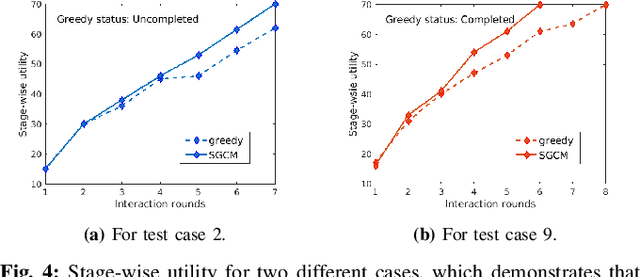
In this study, we explore the application of game theory, in particular Stackelberg games, to address the issue of effective coordination strategy generation for heterogeneous robots with one-way communication. To that end, focusing on the task of multi-object rearrangement, we develop a theoretical and algorithmic framework that provides strategic guidance for a pair of robot arms, a leader and a follower where the leader has a model of the follower's decision-making process, through the computation of a feedback Stackelberg equilibrium. With built-in tolerance of model uncertainty, the strategic guidance generated by our planning algorithm not only improves the overall efficiency in solving the rearrangement tasks, but is also robust to common pitfalls in collaboration, e.g., chattering.