 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplitNet: Sim2Sim and Task2Task Transfer for Embodied Visual Navigation
Paper and Code
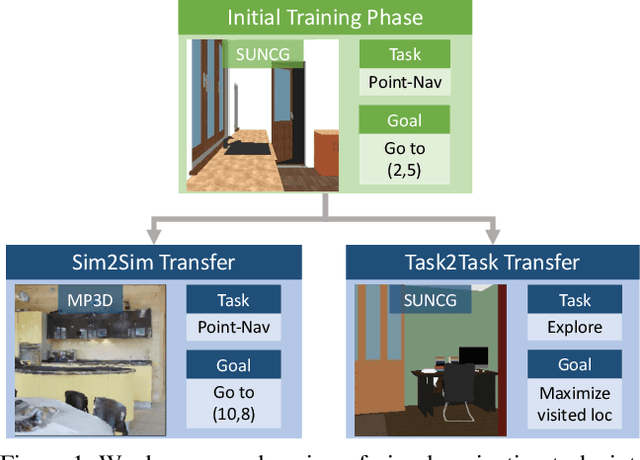
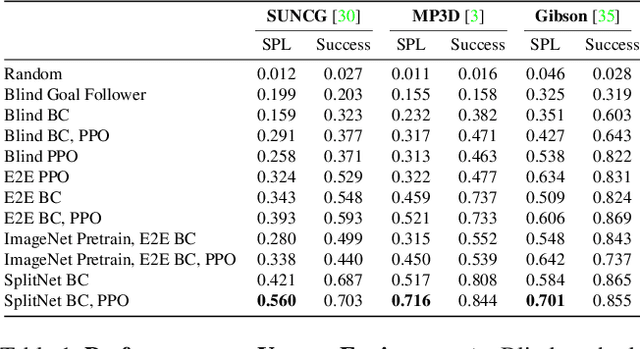
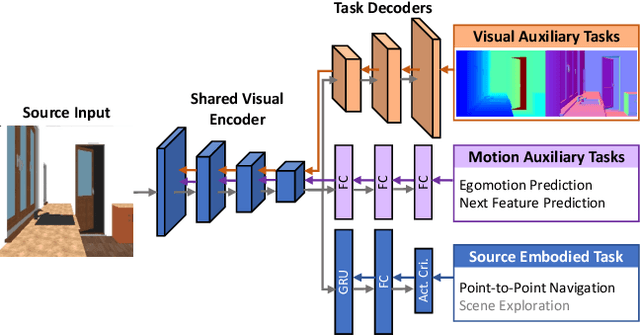
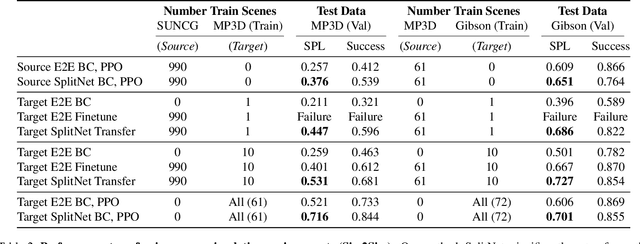
We propose SplitNet, a method for decoupling visual perception and policy learning. By incorporating auxiliary tasks and selective learning of portions of the model, we explicitly decompose the learning objectives for visual navigation into perceiving the world and acting on that perception. We show dramatic improvements over baseline models on transferring between simulators, an encouraging step towards Sim2Real. Additionally, SplitNet generalizes better to unseen environments from the same simulator and transfers faster and more effectively to novel embodied navigation tasks. Further, given only a small sample from a target domain, SplitNet can match the performance of traditional end-to-end pipelines which receive the entire dataset. Code and video are available at https://github.com/facebookresearch/splitnet and https://youtu.be/TJkZcsD2vrc