 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Graph Neural Point Process for Traffic Congestion Event Prediction
Paper and Code
Nov 15, 2023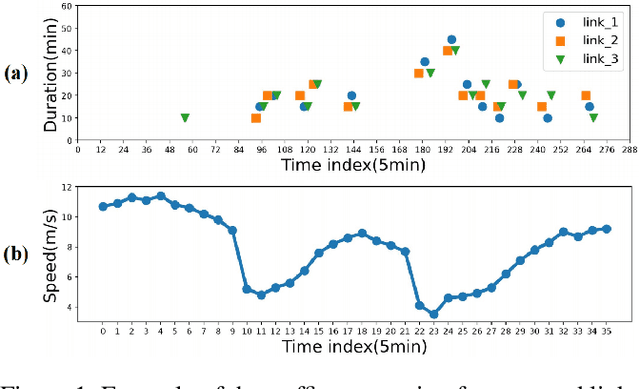
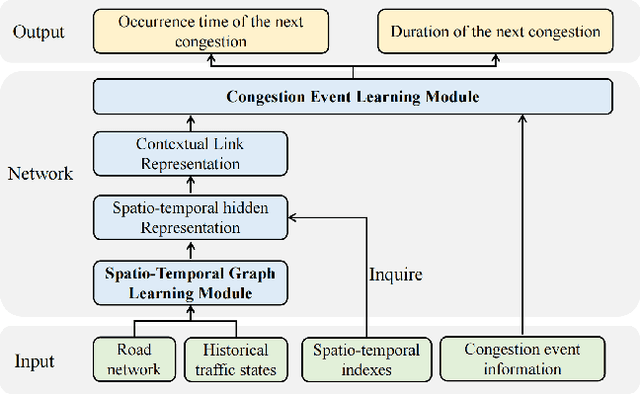
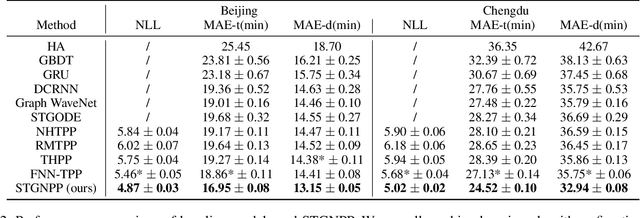
Traffic congestion event prediction is an important yet challenging task in intelligent transportation systems. Many existing works about traffic prediction integrate various temporal encoders and graph convolution networks (GCNs), called spatio-temporal graph-based neural networks, which focus on predicting dense variables such as flow, speed and demand in time snapshots, but they can hardly forecast the traffic congestion events that are sparsely distributed on the continuous time axis. In recent years, neural point process (NPP) has emerged as an appropriate framework for event prediction in continuous time scenarios. However, most conventional works about NPP cannot model the complex spatio-temporal dependencies and congestion evolution patterns. To address these limitations, we propose a spatio-temporal graph neural point process framework, named STGNPP for traffic congestion event prediction. Specifically, we first design the spatio-temporal graph learning module to fully capture the long-range spatio-temporal dependencies from the historical traffic state data along with the road network. The extracted spatio-temporal hidden representation and congestion event information are then fed into a continuous gated recurrent unit to model the congestion evolution patterns. In particular, to fully exploit the periodic information, we also improve the intensity function calculation of the point process with a periodic gated mechanism. Finally, our model simultaneously predicts the occurrence time and duration of the next congestion. Extensive experiments on two real-world datasets demonstrate that our method achieves superior performance in comparison to existing state-of-the-art approaches.