 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Contextual Deep Network Based Multimodal Pedestrian Detection For Autonomous Driving
Paper and Code
May 26, 2021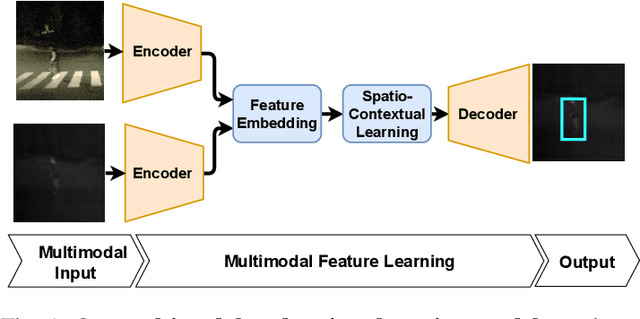
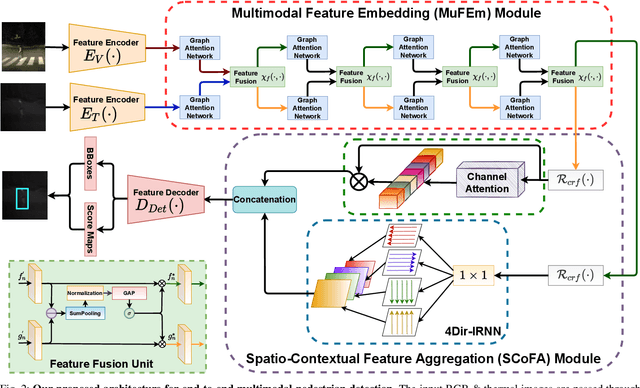
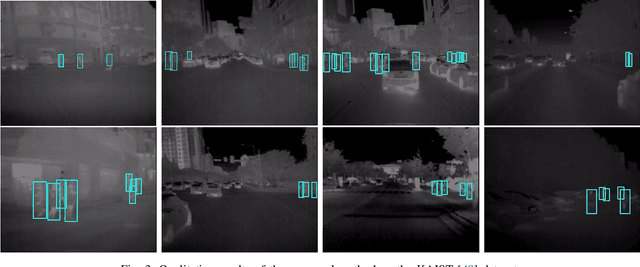
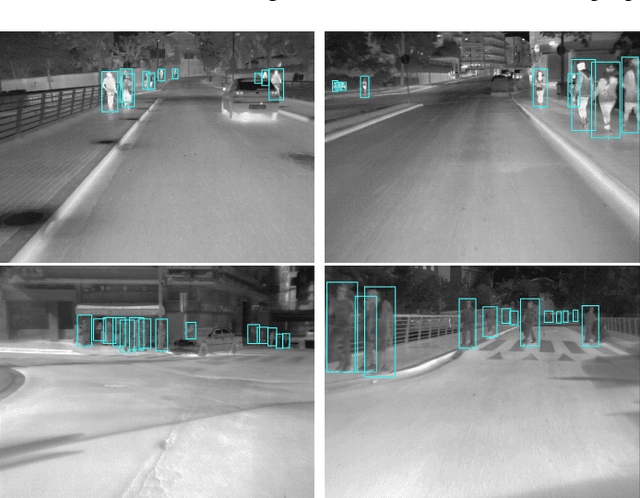
Pedestrian Detection is the most critical module of an Autonomous Driving system. Although a camera is commonly used for this purpose, its quality degrades severely in low-light night time driving scenarios. On the other hand, the quality of a thermal camera image remains unaffected in similar conditions. This paper proposes an end-to-end multimodal fusion model for pedestrian detection using RGB and thermal images. Its novel spatio-contextual deep network architecture is capable of exploiting the multimodal input efficiently. It consists of two distinct deformable ResNeXt-50 encoders for feature extraction from the two modalities. Fusion of these two encoded features takes place inside a multimodal feature embedding module (MuFEm) consisting of several groups of a pair of Graph Attention Network and a feature fusion unit. The output of the last feature fusion unit of MuFEm is subsequently passed to two CRFs for their spatial refinement. Further enhancement of the features is achieved by applying channel-wise attention and extraction of contextual information with the help of four RNNs traversing in four different directions. Finally, these feature maps are used by a single-stage decoder to generate the bounding box of each pedestrian and the score map. We have performed extensive experiments of the proposed framework on three publicly available multimodal pedestrian detection benchmark datasets, namely KAIST, CVC-14, and UTokyo. The results on each of them improved the respective state-of-the-art performance. A short video giving an overview of this work along with its qualitative results can be seen at https://youtu.be/FDJdSifuuCs.